When
Abaqus/Standard
attempts to find a solution for this model, two zero pivots are identified in
the first increment of the analysis suggesting that there are two
overconstraints in the model. These overconstraints have to be identified and
removed to render the model properly constrained. One way to identify possible
overconstraints in the case of simple models is to count the number of degrees
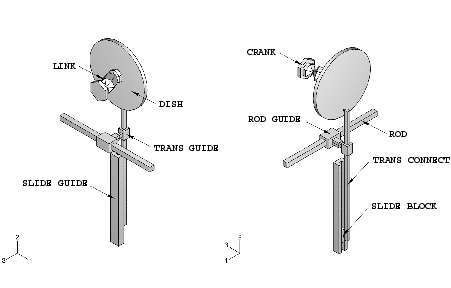
of freedom and constraints. There are nine rigid bodies in the model with a
total of 54 degrees of freedom. There are 21 constraints specified using a
boundary condition. The connector elements enforce additional constraints:
three TRANSLATOR connection types enforce 5 constraints each, two CVJOINT connection types enforce 4 constraints each, one CYLINDRICAL connection type enforces 4 constraints, one HINGE connection type enforces 5 constraints, and one JOIN connection type enforces 3 constraints. Thus, the number of
constraints enforced by connector elements is 35. Consequently, there are two
(21 + 35 – 54) constraints too many in the model, corresponding to the number
of zero pivots identified by the equation solver.
To help the user identify the constraints that should be removed, the
following message is produced in the message file outlining the chains of
constraints that generated the first overconstraint:
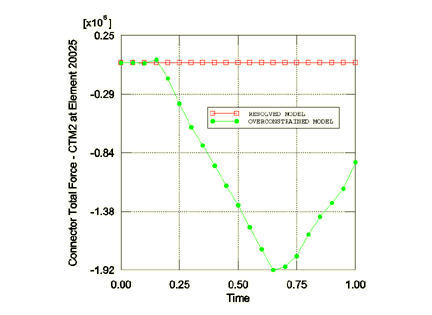
***WARNING: SOLVER PROBLEM. ZERO PIVOT WHEN PROCESSING ELEMENT 20025
INTERNAL NODE 1 D.O.F. 4
OVERCONSTRAINT CHECKS: An overconstraint was detected at one of the
Lagrange multipliers associated with element 20025. There are
multiple constraints applied directly or chained constraints that
are applied indirectly to this element. The following is a list of
nodes and chained constraints between these nodes that most likely
lead to the detected overconstraint.
LAGRANGE MULTIPLIER: 2321 <-> 863: connector element 20025 type
SLOT ALIGN constraining 2 translations and
3 rotations
..2321 -> 10007: *RIGID BODY (or *COUPLING-KINEMATIC)
....10007 -> 3159: *RIGID BODY (or *COUPLING-KINEMATIC)
......3159 -> 3031: connector element 20030 type SLOT REVOLUTE
constraining 2 translations and 2 rotations
........3031 -> 10008: *RIGID BODY (or *COUPLING-KINEMATIC)
..........10008 -> 3134: *RIGID BODY (or *COUPLING-KINEMATIC)
............3134 -> 2824: connector element 20035 type SLOT ALIGN
constraining 2 translations and
3 rotations
..............2824 -> 10009: *RIGID BODY (or *COUPLING-KINEMATIC)
................10009 -> *BOUNDARY in degrees of freedom
1 2 3 4 5 6
..863 -> 10004: *RIGID BODY (or *COUPLING-KINEMATIC)
....10004 -> 427: *RIGID BODY (or *COUPLING-KINEMATIC)
......427 -> 3157: connector element 20010 type JOIN constraining
3 translations
........3157 -> 10001: *RIGID BODY (or *COUPLING-KINEMATIC)
..........10001 -> 780: *RIGID BODY (or *COUPLING-KINEMATIC)
............780 -> 3156: connector element 20005 type
JOIN CONSTANT VELOCITY constraining
3 translations and 1 rotations
..............3156 -> 10002: *RIGID BODY (or *COUPLING-KINEMATIC)
................10002 -> 781: *RIGID BODY (or *COUPLING-KINEMATIC)
..................781 -> 3155: connector element 20001 type
JOIN CONSTANT VELOCITY constraining
3 translations and 1 rotations
....................3155 -> 10003: *RIGID BODY
(or *COUPLING-KINEMATIC)
......................10003 -> *BOUNDARY in degrees of freedom
1 2 4 5 6
..........10001 -> *BOUNDARY in degrees of freedom 1 2 4 5
....10004 -> 3158: *RIGID BODY (or *COUPLING-KINEMATIC)
......3158 -> 1539: connector element 20015 type JOIN REVOLUTE
constraining 3 translations and 2 rotations
........1539 -> 10005: *RIGID BODY (or *COUPLING-KINEMATIC)
..........10005 -> 1575: *RIGID BODY (or *COUPLING-KINEMATIC)
............1575 -> 2027: connector element 20020 type SLOT ALIGN
constraining 2 translations and
3 rotations
..............2027 -> 10006: *RIGID BODY (or *COUPLING-KINEMATIC)
................10006 -> *BOUNDARY in degrees of freedom
1 2 3 4 5 6
Please analyze these constraint loops and remove unnecessary
constraints.The zero pivot warning message identifies an internal node (Lagrange
multiplier) associated with the identified zero pivot. A typical line contains
information pertaining to one constraint. The following line from the output:
LAGRANGE MULTIPLIER: 2321 <-> 863: connector element 20025 type
SLOT ALIGN constraining 2 translations and
3 rotationsidentifies that the Lagrange multiplier associated with the zero pivot
enforces one of the five constraints (SLOT and ALIGN) associated with connector element 20025 between user-defined
nodes 2321 and 863. Each of the subsequent lines conveys information related to
one constraint in the chains of constraints originating at the zero pivot node
or in chains adjacent to them. For example, the line
....10007 -> 3159: *RIGID BODY (or *COUPLING-KINEMATIC)
informs the user that there is a rigid body constraint between nodes 10007
and 3159, while the line
................10009 -> *BOUNDARY in degrees of freedom
1 2 3 4 5 6states that there is a boundary condition fixing degrees of freedom 1
through 6 at node 10009.
Indentation levels are used to help in identifying the links in a chain of
constraints. A detailed explanation of the chains is printed at the first
occurrence of an overconstraint in the message file. Using this methodology,
the following chains of constraints starting from the two nodes involved in the
Lagrange multiplier constraint are identified:
Lagrange multiplier: 2321 -> 10007 -> 3159 -> 3031 -> 10008 -> 3134
-> 2824 -> 10009 -> *BOUNDARY
Lagrange multiplier: 863 -> 10004 -> 427 -> 3157 -> 10001 -> 780
-> 3156 -> 10002 -> 781 -> 3155 -> 10003 -> *BOUNDARY
Lagrange multiplier: 863 -> 10004 -> 427 -> 3157 -> 10001
-> *BOUNDARY
Lagrange multiplier: 863 -> 10004 -> 3158 -> 1539 -> 10005 -> 1575
-> 2027 -> 10006 -> *BOUNDARY
If any of the chains terminates in a free end (meaning the chain does not
form a closed loop or end in a constraint), the chain does not have any
contribution in generating the overconstraint. In the example above, all the
identified chains terminate in a constraint and, therefore, may contribute to
the overconstraint.
A second zero pivot is generated by the same Lagrange multiplier associated
with internal node 1 of connector element 20025 at degree of freedom 5. The
chains associated with the zero pivot caused at degree of freedom 5 are
identical to the ones at degree of freedom 4 and are not repeated in the
message file.