Problem description and model definition
With some exceptions, noted here, the description of the tire and finite element model is the same as that given in Import of a steady-state rolling tire. Since the focus of this analysis is tread wear, the tread is modeled in more detail. In addition, a linear elastic material model is used in the tread region to avoid difficulties advecting the hyperelastic material state during the adaptive meshing procedure.
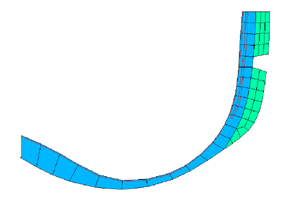
The axisymmetric half-model of the 175 SR14 tire is shown in Figure 1. The rubber matrix is modeled with CGAX4 and CGAX3 elements. The reinforcement is modeled with SFMGAX1 elements that carry rebar layers. An embedded element constraint is used to embed the reinforcement layers in the rubber matrix. The tread is modeled with an elastic material of elastic modulus 6 MPa and Poisson’s ratio 0.49. The rest of the tire is modeled with the hyperelastic material model. The polynomial strain energy potential is used with coefficients C10=106, C01=0.0, and D1=2 × 10–8. The rebar layers used to model the carcass fibers are oriented at 0° to the radial direction and have an elastic modulus of 9.87 GPa. The modulus in compression is set to 1/100th of the modulus in tension. The Marlow hyperelastic model is used to specify the nominal stress-nominal strain data for such a material definition. The elastic modulus in tension of the material of the belt fibers is 172.2 GPa. The modulus in compression is set to 1/100th of the modulus in tension. The fibers in the belts are oriented at +20° and −20° with respect to the hoop (circumferential) direction.
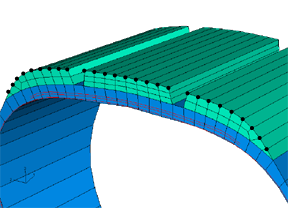
The three-dimensional model is created by first revolving the axisymmetric half-model, using symmetric model generation, by 360° to generate the partial three-dimensional model shown in Figure 2. A focused mesh is applied at the footprint region. The partial three-dimensional model is then reflected about a line to generate the full three-dimensional model. The results are then transferred from the end of the footprint simulation for the partial three-dimensional model (see Figure 2).
Adaptive meshing limitations in tire wear calculations
The use of adaptive meshing necessarily places the following restrictions on the tire model used for this example:
Cylindrical elements are currently not supported with adaptive meshing and are not used in this model.
Adaptive meshing generally performs poorly with hyperelastic material models, due to the inaccurate advection of deformation gradient state variables. The tread, therefore, is modeled with an elastic material definition.
Embedded elements including rebar layers cannot be used within the adaptive mesh domain.
Adaptive mesh smoothing on free surfaces occurs in directions determined by features of the element geometry, which may not always be consistent with or easily enable description of wear directions. As a result, as discussed below, you will generally have to do additional work to explicitly describe the direction of wear.