Response of a submerged cylinder to an underwater explosion shock
wave
This example demonstrates how
Abaqus/Explicit
can be used to predict the transient response of submerged structures that
experience loading by an acoustic pressure shock wave resulting from an
underwater explosion (UNDEX).
This class of problem is characterized by a strong coupling between the
structural motions and acoustic pressures on the wetted interface between the
external fluid and the structure. The structural response in a strongly coupled
acoustic-structural system can be described as a combination of the following:
Low-frequency response characterized by structural wavelengths that are
significantly shorter than the associated acoustic wavelengths. The external
fluid on the structure adds an effective mass to the structure on the wetted
interface.
High-frequency response characterized by structural wavelengths that are
significantly longer than the associated acoustic wavelengths. The external
fluid on the structure acts as a simple damping mechanism, where energy is
transported away from the structure via acoustic radiation.
Intermediate-frequency response characterized by structural wavelengths
that are similar in length to the associated acoustic wavelengths. In this
frequency regime the external fluid has both an added mass and a radiation
damping influence on the structure.
The spherical pressure wave associated with an underwater explosion
(UNDEX) shock loading is characterized by a
very steep front where the maximum pressure is attained over an extremely short
time duration (rise time). The pressure then drops off exponentially over a
significantly longer period of time. Therefore,
UNDEX shock loads can be expected to excite
submerged structures over a large frequency range that will include low, high,
and intermediate response frequencies. The boundaries of the external fluid
must be located a sufficient distance from the structure to ensure proper
low-frequency response, while the size of the acoustic elements must be small
enough to accurately represent the propagation of high-frequency acoustic waves
away from the submerged structure.
Problem and geometry description
This example problem is based upon an UNDEX
experiment in which a submerged test cylinder is exposed to a pressure shock
wave produced by a 60 lb HBX-1 explosive
charge. Kwon and Fox originally described the experiment along with a set of
selected experimental results. The objective of this class of analysis is to
evaluate the behavior and integrity of a structure under
UNDEX loading conditions.
The test cylinder is made of
T6061-T6
aluminum. It has an overall length of 1.067, an outside diameter of 0.305, a
wall thickness of 6.35 mm, and 24.5 mm thick welded endcaps. The cylinder is
suspended horizontally in a 40 m deep fresh water test quarry. The 60 lb
HBX-1 explosive charge and the cylinder are
both placed at a depth of 3.66 m. The charge is centered off the side of the
cylinder and located 7.62 m from the cylinder surface. The suspension depths,
charge offset, and duration of the test are selected such that cavitation of
the fluid is not significant and no bubble pulse occurs. Strain gauges are
placed at several locations on the outer surface of the test cylinder, as shown
in
Figure 1.
The strain gauge experimental data are filtered at 2000 Hz. The experimental
data presented here are obtained by digitizing the Kwon and Fox strain history
curves.
When the acoustic fluid behavior is linear (i.e., no cavitation), the total
acoustic pressure within the fluid consists of an incident wave and a scattered
wave component. For this example the incident wave is the shock wave produced
by the UNDEX charge. The scattered wave is the
acoustic field generated by the interaction of the incident wave and the
submerged structure. The nature of the incident wave can be determined from
either empirical formulas or experimental data. Therefore, the spherical
incident shock wave is applied as a transient load active on both the acoustic
and structural meshes at their common surfaces (the wetted interface), and the
external fluid pressure degrees of freedom represent only the unknown scattered
component of the total acoustic pressure. The type of incident wave loading is
either a scattered wave or a total wave formulation. The scattered wave
formulation described above is the default condition for
Abaqus/Explicit
analyses. The total wave formulation is used for cases where nonlinear fluid
response is expected or where the total acoustic pressure history is prescribed
at an acoustic fluid boundary.
During the UNDEX test two pressure
transducers are positioned 7.62 m from the charge, away from the cylinder but
at the same depth as the cylinder. These transducers provide an experimental
determination for the pressure vs. time history of the spherical incident shock
wave as it travels by the point on the cylinder closest to the charge (strain
gauge location B1).
Figure 2
shows a time history curve of the incident pressure wave recorded by the
transducers. The input file shock-pulse.inp contains this time history curve as
an amplitude table used to define the incident wave loading.
Abaqus/Explicit
model
Figure 3
shows the S4R finite element shell mesh used to represent the test cylinder.
The mesh consists of 2402 nodes (14412 DOF)
and 2400 elements with 40 circumferential divisions and 53 axial divisions. The
element connectivity is such that each shell normal is directed into the
external fluid. The nodes are positioned on the outside surface of the test
cylinder. The S4R elements adjacent to the endcaps are dummy elements with reduced
mass and stiffness used only to provide surfaces that correspond to the
thickness of the endcaps. BEAM type
MPCs are used to tie the endcaps to the main
cylinder body. The local coordinate system is used to define the shell element
material axes for postprocessing, such that the local 1-direction is aligned
with the cylinder's axis for the main body and is radially directed for the
endcaps. The local 2-direction is in the circumferential (hoop) direction for
both the cylinder main body and the endcaps.
The external fluid is meshed with 4-node AC3D4 acoustic tetrahedral elements. The outer boundary of the external
fluid is represented by a cylindrical surface with spherical ends. The
characteristic radius of the outer boundary is 0.915 m. The outer boundary must
be placed a sufficient distance from the cylinder so that the added mass
associated with the low-frequency beam bending modes of the cylinder is
represented adequately. The beam bending modes correspond to an
sinusoidal translation of the cylinder's cross-section through the fluid. For
evaluating added mass effects when using a simple plane wave radiation
impedance boundary for the external fluid, the outer boundary of the fluid can
be considered rigid (nonradiating). Therefore, an analytical solution for the
added mass associated with the translation of an infinite cylinder of radius
located within a fluid-filled infinite cylinder of radius
can be used to determine an appropriate characteristic radius for the external
fluid. Results for the analytical solution presented by Blevins are listed in
Table 1.
The characteristic radius is based upon an outer boundary
()
to cylinder radius ()
ratio of 6.0, which corresponds to an added mass error of about 6% for infinite
cylinders. When using enhanced surface impedance models, the outer fluid
boundary location can be placed at about half of the distance required when
using the plane wave radiation impedance model. However, for this example the
ratio was maintained at 6.0 even when using the source-based surface impedance
models for the external fluid. Comparable results for the structural response
can be obtained when the source-based boundaries were located half as far from
the structure. For the low-frequency beam bending modes, system losses
(damping) caused by hydrodynamic drag and/or fluid viscosity are not accounted
for by acoustic radiation. Therefore, mass-proportional damping applied to the
test cylinder mesh is used to approximate these types of losses.
Figure 4
shows the combined external fluid and test cylinder meshes. One quarter of the
fluid mesh is omitted from this figure to allow an inspection of the acoustic
element mesh inside the external fluid domain.
The nodal seeding on the fluid outer boundary is set at 0.10 m,
corresponding to 9.7 element divisions per acoustic wavelength at a response
frequency of 1500 Hz. The nodal seeding on the fluid wetted interface with the
test cylinder is set at 0.04 m, corresponding to 24.4 element divisions per
acoustic wavelength at 1500 Hz. The radiation boundary condition is applied on
the fluid outer-boundary surfaces.
Fluid-structure coupling and shock wave loading
The acoustic structural coupling between the fluid mesh acoustic pressures and the test cylinder
structural displacements at their common surfaces (the wetted interface) is accomplished
with a surface-based tie constraint. Figure 5 shows the surface mesh at the acoustic-structure wetted interface associated with the
external fluid (Figure 3 shows the test cylinder surface). Since the acoustic mesh is coarser than the structural
mesh, the surface of the external fluid at the wetted interface is designated as the main
surface. This pairing creates an internal coupling of the acoustic pressure and structural
displacements at the test cylinder (secondary) surface nodes and ties the cylinder's
acoustic pressures to the fluid mesh acoustic pressures at the wetted interface.
Figure 5
also illustrates the concept of a source point and a standoff point as they
relate to an incident acoustic wave loading. For this example the source point
represents the actual physical location of the explosive charge relative to the
structure. The standoff point represents the location of the incident wave
(shock front) at the start of the analysis (total time = 0.0) and is the point
at which the pressure history of the incident wave is provided. For solution
efficiency the standoff point should be placed at the location on the
fluid-structure interface that is closest to the source point. The standoff
point can be placed away from the structure closer to the source point, but
this will only delay the onset of the transient response. Under no
circumstances should the standoff point be located within or behind the
structure being analyzed.
The incident wave can either be planar or spherical and requires the
location of the standoff point and the source point. For a spherical shock
wave, as in this example, the relative positions of the standoff point and
source point determine how the wave's pressure will decay with distance from
the source point. For a planar wave, which does not decay, the relative
positions of the standoff point and source point are used to define the
direction of incident wave travel. The fluid properties associated with the
incident wave includes wave speed. Defining the incident wave properties
independent of the acoustic mesh allows incident wave loading to be used in the
analysis of weakly coupled or uncoupled acoustic-structural systems (i.e., air
blast analyses). For these cases the incident wave loading can be applied to a
structure when no acoustic medium is directly modeled.
The pressure history at the standoff point is used to drive the incident
wave. The amplitude definition specifies the surface name to which the incident
wave loading is applied and a reference magnitude for the pressure curve. For
acoustic-structural systems where the fluid and structure are both modeled and
coupled, the incident wave loading must be defined to act upon both the fluid
and structural surfaces at the wetted interface. Acoustic volumetric
acceleration loads corresponding to the incident wave are then applied to the
fluid surface, while the incident wave pressures are applied to the structural
surface.
Results and discussion
The
Abaqus/Explicit
model for this UNDEX example has a total of
23337 active degrees of freedom and requires approximately 160
MB of memory. The transient analysis is run
for 0.008 seconds with a 1.69 × 10-6 critical time increment (~4733
solution increments).
Figure 6
shows the time history of axial displacement (U3) for the center nodes of the endcaps. These curves clearly show
the periodic response associated with a dominant axially directed mode of the
cylinder–endcap structure.
Figure 7
shows the 1-direction translation (U1) of the endcap center nodes. The 1-direction is also the primary
direction of shock wave propagation. The response curves clearly illustrate
that there is a rigid body translation of the cylinder, and the oscillations
are representative of the fundamental beam bending mode of the cylinder.
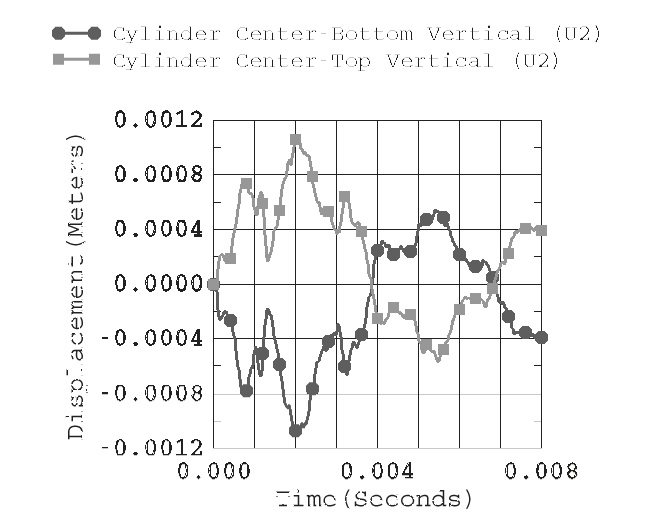
Figure 8
shows the time history of vertical (U2) displacement for nodes located at the top and bottom midplane of
the test cylinder. These curves suggest that a dominant
N=2 ovalization mode of vibration occurs at about 170 Hz
(based on an estimated period of 0.0059 seconds). The frequency for the first
ovalization mode of the test cylinder in a vacuum is 330 Hz, based upon an
Abaqus/Standard
eigenvalue extraction analysis. This shift in the N=2
response mode frequency illustrates the added mass effect of the external fluid
on the response of the submerged cylinder.
Figure 9
through
Figure 11
contain time history plots of the test cylinder strains obtained from the
Abaqus/Explicit
analysis with experimental data for locations
B1, C1, and
A2. The experimental curves are obtained by
digitizing the response plots published by Kwon and Fox. The digitized curves
are shifted to the left by 0.0002 seconds on the time axis to account for an
apparent time differential between the experiment and the
Abaqus/Explicit
solution.
Figure 9
contains history plots of the axially directed strains at location
B1. The analytical-experimental correlation at
an early time (peak strain prediction) is very good, as is the prediction for
the dominant response frequency of the test cylinder. The predicted strain
oscillations at longer times suggest that the modeling of hydrodynamic drag
damping and viscous losses by applying mass damping to the cylinder mesh could
be improved.
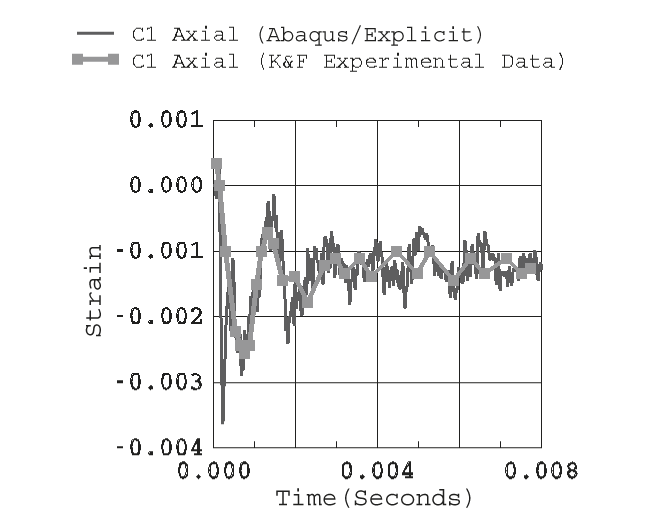
Figure 10
contains the history plots for the axially directed strains at location
C1. The initial peak response (high frequency)
contained in the
Abaqus/Explicit
solution is not present in the experimental data. This may be due to the
sampling rate and filtering techniques used to obtain the data or to high
strain gradients being averaged over the effective length of the strain gauge.
Otherwise, the
Abaqus/Explicit
solution closely tracks the experimental data and provides a conservative
estimate for the peak response.
Figure 11
contains the history plots for the hoop-directed strains at location
A2. As in
Figure 10,
the initial peak response (high frequency) contained in the
Abaqus/Explicit
solution is not present in the experimental data. Otherwise, the
Abaqus/Explicit
solution closely tracks the experimental data.
Figure 9
through
Figure 11
indicate that the overall UNDEX analysis model
provides a conservative estimate of the cylinder's peak response and is,
therefore, appropriate for meeting the analysis objective.
Figure 12
shows a contour plot of accumulated equivalent plastic strain (PEEQ) on the outer surface of the test cylinder. To obtain the plot,
an averaging threshold of 100% is used and the maximum contour value is
specified as 9.16E−3. The plot corresponds to the end of the transient
analysis, which is well after the last increment of plastic strain is detected
from a plot of the cylinder's total plastic strain energy vs. solution time.
The slight degree of solution nonsymmetry exhibited about the cylinder's
midplane is due to the nonsymmetric nature of the free tetrahedron acoustic
element mesh of the external fluid.
The time history of the shock wave pressure at the standoff point defined by
the
AMPLITUDE option.
References
Kwon, Y.
W., and P.
K. Fox, “Underwater
Shock Response of a Cylinder Subjected to a Side-On
Explosion,” Computers and Structures, Vol.
48, No. 4, 1993.
Blevins, R.
D., Formulas
for Natural Frequencies and Mode
Shapes, Robert E. Fruger
Publishing
Co., 1979.
Tables
Table 1. Added mass for N=1 translation mode of an infinite
cylinder (fluid between concentric cylinders).
Cylinder Radius Ratio
()
Added Mass Ratio
(External Boundary/Infinite Domain)
1.5
2.600
2.0
1.667
4.0
1.133
6.0
1.057
8.0
1.032
16.0
1.008
24.0
1.004
Figures
Figure 1. Strain gauge locations (A1,
A2, B1,
B2, B3,
C1, C2) with
B1 closest to the charge. Figure 2. Incident pressure wave transient (shock pulse). Figure 3. Test cylinder model. Figure 4. Test cylinder and external fluid acoustic mesh. Figure 5. External fluid surface mesh at the acoustic-structure wetted
interface. Figure 6. Axially directed displacements (U3) at the center of the endcaps. Figure 7. Displacements at the center of the endcaps. Figure 8. Vertical (U2) displacements at the cylinder midplane (top and bottom). Figure 9. Axially directed strains at location
B1. Figure 10. Axially directed strains at location
C1. Figure 11. Hoop-directed strains at location
A2. Figure 12. Accumulated equivalent plastic strains
(PEEQ).