a discrete particle element and a rigid plane; and
JKR and shifted
JKR force-displacement relation between
contacting discrete particles.
Problem description
This section provides basic verification tests for nonadhesive contact and
adhesive contact between discrete particles. For the nonadhesive contact the
normal and tangential contact formulations in
Abaqus/Explicit
are compared with the analytical results based on the Hertzian contact
formulation with friction in five tests described in
Chung
(2011). For the adhesive contact case the results for the
JKR and shifted
JKR adhesion models in
Abaqus/Explicit are compared with analytical
solutions.
Table 1. Seven types of tests to verify normal and tangential contact formulation
for discrete particle elements.
Description of contact
Feature tested
Test 1
Elastic head-on collision of two identical spheres
Elastic head-on contact between two spheres
Test 2
Elastic normal impact of a sphere with a rigid plane
Elastic normal contact between a sphere and a plane
Test 3
Oblique impact of a sphere with a rigid plane at a
constant normal velocity and an incident angle
Tangential contact between a sphere and a plane
Test 4
Head-on collision of two identical spheres at the same
translational speed but with equal and opposite angular speed
Tangential contact between two spheres
Test 5
Head-on collision of two different spheres with
different translational and angular velocities
Tangential contact between two spheres
Test 6
Normal adhesive contact between two particles
JKR adhesion between
two spheres.
Test 7
Normal adhesive contact between two particles
Shifted JKR adhesion
between two spheres.
These seven tests characterize different impact scenarios between discrete
particle elements and a discrete particle element with a rigid plane.
Model:
Test 1
A head-on collision of two identical spheres of radii 0.01 m with equal and
opposite translational speed.
Test
2
A collision of a sphere of radius 0.1 m with translational velocity and a
fixed rigid plane in the normal direction.
Test
3
An impact between a fixed rigid plane and a sphere of radius 1.00 ×
10−5 m at a constant normal velocity and varying incident angles.
This test involves a series of simulations, each with a different tangential
velocity of the sphere to characterize a particular incident angle.
Test
4
A head-on collision of two identical spheres of radii 0.1 m with the same
translational speed but with equal and opposite angular speed. This test
involves a series of simulations, each with a different angular speed of the
spheres.
Test
5
A head-on collision of two differently sized spheres with different
translational and angular velocities. A sphere of radius 0.1 m has
translational and angular velocity; the other sphere, which is five times
bigger and 1000 times denser, is initially stationary. The test has multiple
simulations, each with a different angular velocity of the smaller sphere.
Test
6
Normal contact between two spheres of the same size. A sphere of radius 5.0
mm is brought into contact with another fixed sphere of the same radius. The
spheres are compressed against each other and are then separated. The motion of
the first sphere is controlled via a displacement-type boundary condition. The
JKR adhesive contact interface is specified
between the contact particles.
Test
7
Normal contact between two spheres of the same size. A sphere of radius 5.0
mm is brought into contact with another fixed sphere of the same radius. The
spheres are compressed against each other and are then separated. The motion of
the first sphere is controlled via a displacement-type boundary condition. The
shifted JKR adhesive contact interface is
specified between the contact particles.
Mesh:
The spheres in all tests are modeled using discrete particle elements (PD3D), and the rigid plane (if applicable) is modeled using
conventional shell elements (S4R) that are rendered rigid.
Material:
The seven tests are all conducted for two different materials, as described
in
Table 2.
Table 2. Material properties of the spheres.
Property
Young's Modulus (GPa)
Poisson's ratio
Density (kg/m3)
Test 1
Glass
48.0
0.20
2800
Limestone
20.0
0.25
2500
Test 2
Aluminum alloy
70.0
0.30
2699
Magnesium alloy
40.0
0.35
1800
Test 3
Steel
208
0.30
7850
Polyethylene
1.0
0.40
1400
Test 4
Aluminum alloy
70.0
0.33
2700
Copper
120
0.35
8900
Test 5
Aluminum alloy
70
0.33
2700*
Nylon
2.5
0.40
1000*
Test 6
Polyethylene
1.0
0.42
1400
Test 7
Polyethylene
1.0
0.42
1400
*Density of the smaller sphere. The bigger sphere is 1000 times denser.
Boundary conditions:
Wherever applicable, the rigid plane is fixed in all degrees of freedom.
Initial conditions
In tests 1 through 5 the spheres are given an initial translational and
angular velocity (if applicable), as described in
Table 3.
The spheres in tests 6 and 7 do not have any initial conditions. The motion of
the spheres is specified using displacement-type boundary conditions using an
amplitude curve.
0.004 in compression and 0.001 in
tension via a smooth amplitude curve
0
Test 7
0.004 in compression and 0.001 in
tension via a smooth amplitude curve
0
*Initial speed of the smaller sphere. The bigger sphere is stationary.
Contact formulation
In tests 1–5 the general contact formulation in
Abaqus/Explicit
is used. Contact is enforced using the tabular pressure-overclosure
relationship. Since the contact area of the discrete element is unity, the
pressure-overclosure relationship is actually given as force-penetration data
computed through Hertzian contact relations with friction:
where
F is the contact force,
is the penetration,
and
are the radii of the two spheres,
and
are the Young's moduli, and
and
are the Poisson's ratios of the materials of two spheres. A rigid plane is
approximated by using a large radius and Young's moduli for one of the spheres
in the Hertzian contact relations.
For tests 6 and 7 the JKR and shifted
JKR adhesive contact interface model is
specified between the contact spheres. The surface energy between contacting
spheres for both these tests is 50.0 J/m2.
The friction coefficient for tangential contact behavior for each test is
defined as listed in
Table 4.
Table 4. Friction coefficients.
Friction coefficient
Test 1
0.35
Test 2
0.00
Test 3
0.30
Test 4
0.40
Test 5
0.40
Test 6
0.0
Test 7
0.0
Contact damping is absent in all tests; hence, the coefficient of
restitution of the collision in the normal direction is 1.0, while friction is
the only source of energy dissipation.
Results and discussion
Test
1
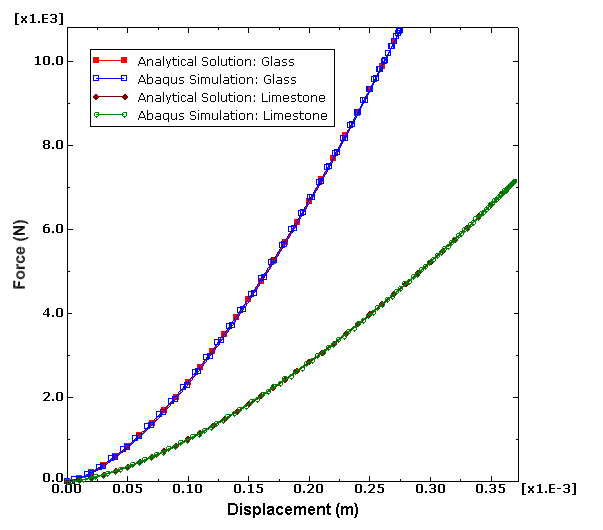
The elastic contact force is plotted against penetration (see
Figure 1)
for the two materials and for the analytical results. The maximum contact
force, the maximum penetration, and the duration of contact are compared with
the analytical results (see
Chung,
2011), as shown in
Table 5.
Table 5. Normal collision of two spheres.
Property
Glass
Limestone
Abaqus
Analytical
Abaqus
Analytical
Contact duration (μs)
40.85
40.34
54.65
54.20
Maximum penetration (μm)
274.87
274.11
369.06
368.30
Maximum contact force (N)
10741.3
10696.9
7130.2
7108.1
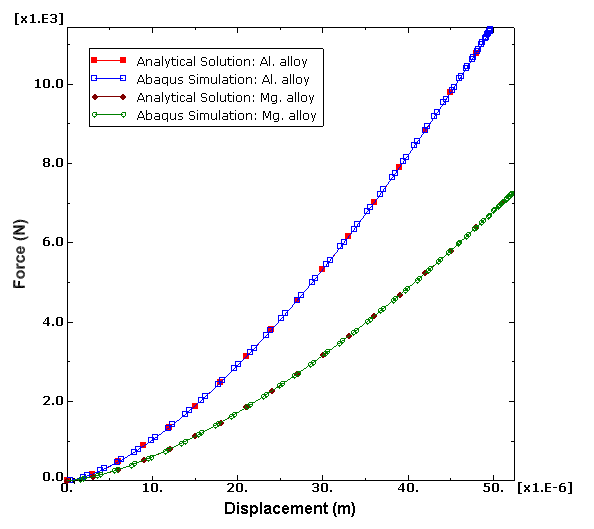
Test 2
The elastic contact force is plotted against penetration (see
Figure 2)
for the two materials and for the analytical results. The maximum contact
force, the maximum penetration, and the duration of contact are compared with
the analytical results (see
Chung,
2011), as shown in
Table 6.
Table 6. Normal collision of a sphere with a rigid plane.
Property
Aluminum alloy
Magnesium alloy
Abaqus
Analytical
Abaqus
Analytical
Contact duration (μs)
732
731.59
767
766.99
Maximum penetration (μm)
49.71
49.72
52.12
52.12
Maximum contact force (N)
11369.4
11370.8
7232.1
7232.0
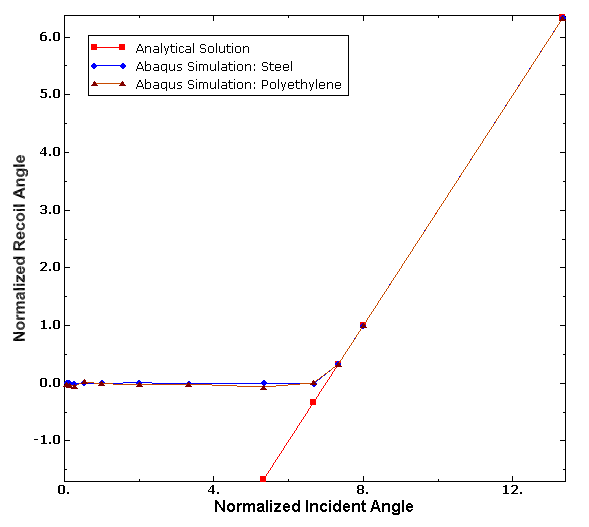
Test 3
The normalized incident angle, the normalized recoil angle, and the
normalized postcollision angular speed for the sphere are calculated for each
simulation. The normalized incident angle is the ratio of the precollision
relative tangential velocity of the contact point of the spheres to the
precollision relative normal velocity of the center of the spheres scaled by
the friction coefficient. The normalized postcollision angular speed is the
ratio of the postcollision angular speed scaled by the radius of the sphere to
the postcollision normal velocity of the sphere.
Figure 3
shows a plot of the normalized recoil angle versus the normalized incident
angle compared with the analytical results. The normalized recoil angle is the
ratio of the postcollision relative tangential velocity of the contact point of
the spheres to the postcollision relative normal velocity of the center of the
spheres scaled by the friction coefficient.
Figure 4
shows a plot of the normalized postcollision angular speed versus the
normalized incident angle compared with the analytical results. The plots in
Figure 3
and
Figure 4
show that sticking persists until the initial tangential velocity reaches a
threshold value, beyond which slipping occurs during the collision.
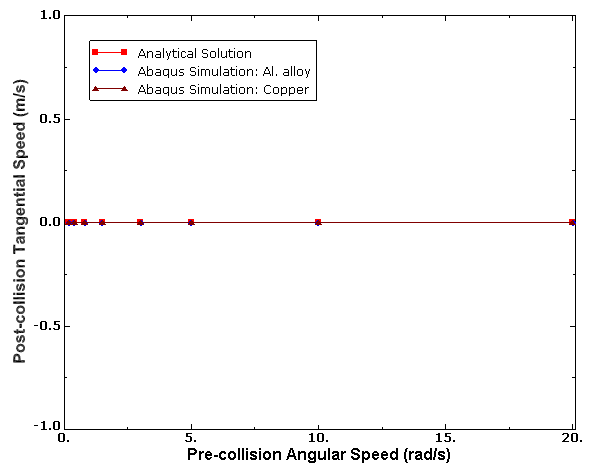
Test
4
Figure 5
shows a plot of the calculated postcollision tangential speed of the contact
point versus the initial angular speed of the sphere compared with the
analytical results. In
Figure 6
the postcollision angular speed is plotted against the initial angular speed of
the sphere along with the analytical results. Since the angular speed is the
same for both the spheres with opposite direction of spin, no relative slip
occurs during the collision; hence, the postcollision tangential velocity is
absent. The comparison between the initial and the final angular speeds shows
that there is no energy dissipation due to friction in this model because
relative slip is absent.
Test
5
The tangent of the incident and the recoil angles are evaluated for each of
the simulations. The recoil angle is the ratio of the relative tangential
velocity of the contact point of the spheres to the relative normal velocity of
the center of the spheres after the collision. The incident angle is the same
quantity evaluated before the collision.
Figure 7
shows a plot of the tangent of the recoil angle against that of the incident
angle. As in test 3, below a threshold angular velocity, the smaller sphere
sticks to the bigger sphere. Beyond this threshold value, it slips during the
collision.
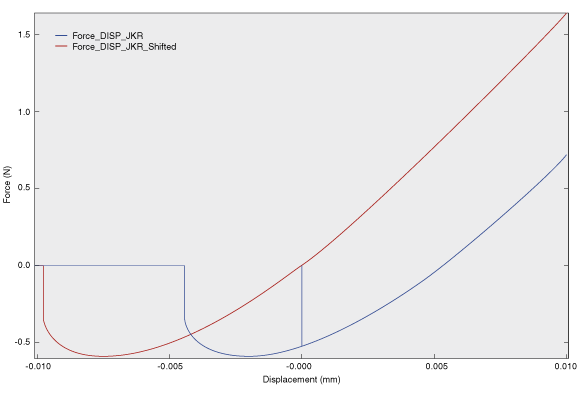
Test
6
The blue curve in
Figure 8
shows the force-displacement response. The analytical value of the pull-off
force is −0.589 N. The analytical value of the separation distance is
−0.0044174 mm. Both of these values agree with the numerical results obatined
from Abaqus/Explicit.
Test
7
The red curve in
Figure 8
shows the force-displacement response. The analytical value of the pull-off
force is −0.589 N. This is the same value as for the unshifted
JKR adhesion model. The analytical value of
the separation distance is −0.0097687 mm. Both of these values agree with the
numerical results obtained from Abaqus/Explicit.
Head-on collision of two identical spheres at the same translational speed,
but with equal and opposite angular speed using automatic time incrementation.
Normal contact between two spheres with
JKR adhesion and shifted
JKR adhesion models, respectively, using
automatic time incrementation.
References
Chung, Y.C., and J. Y. Ooi, “Benchmark
Tests for Verifying Discrete Element Modelling Codes at Particle Impact
Level,” Granular
Matter, vol. 13, pp. 643–656, 2011.
Figures
Figure 1. Contact force vs. penetration for collision of two spheres. Figure 2. Contact force vs. penetration for collision of a sphere with a rigid
plane. Figure 3. Normalized recoil angle vs. normalized incident angle. Figure 4. Normalized postcollision angular speed vs. normalized incident
angle. Figure 5. Postcollision tangential speed vs. precollision angular speed. Figure 6. Postcollision angular speed vs. precollision angular speed. Figure 7. Tangent of the recoil angle vs. tangent of the incident angle of the
smaller sphere. Figure 8. Force vs. displacement relationship for JKR and shifted JKR adhesion
model.