Inserting an Adaptive System | |||
| |||
-
From the Component Use section of the action bar, click Insert Adaptive Systems
 .
.
- The active product is the insertion parent.
- Component Specifications available to receive an Adaptive System (of the right type, not yet populated) are highlighted.
- Messages are displayed on the right top of the screen to help you through the command.
- Define the inputs.
- Click
 to select an Adaptive System with the Content Chooser, or
to select an Adaptive System with the Content Chooser, or  to select an Adaptive System from a catalog Browser.The preview of the Adaptive System is attached to the cursor.
to select an Adaptive System from a catalog Browser.The preview of the Adaptive System is attached to the cursor. - Pick an Component Specification.
For each Adaptive System:
- An edition dialog box is available on the right of the screen.
- The preview of the Adaptive System snaps to the Component Specification (or Component Specifications) and is oriented accordingly.
- The selected Adaptive System reference is duplicated.
- An engineering connection of type Rigid is created between the selected Component Specification and the Hook of the Adaptive System.
- The temporary engineering connections of the Adaptive System are rerouted in context.
- The temporary MechanismForm of the Adaptive System is replaced by that of the model.
- A context toolbar with
 is attached to the current Adaptive System.
is attached to the current Adaptive System.
- Click
-
If several Component Specifications are available, click
 to work in multiselection mode.
All the Adaptive Systems are instantiated in one click, with a preview on each Component Specification.
to work in multiselection mode.
All the Adaptive Systems are instantiated in one click, with a preview on each Component Specification.
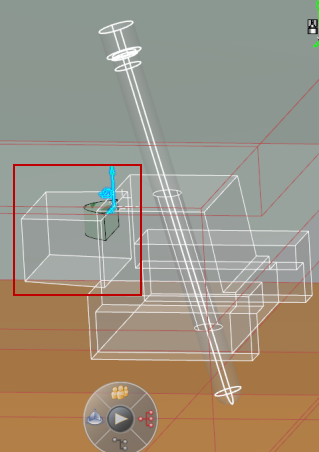
- If the Adaptive System contains a publication of a solid named MechanismForm, this temporary MechanismForm is replaced automatically with the nearest MechanismForm found in your model. If the replacement cannot be done automatically, click and select the body containing the solid of your model to do it manually.
The picture below shows the preview of a Slider, its MechanismForm being the cube inside the red rectangle. The MechanismForm of the model is the half cylinder solid.
This is the final Slider, where the temporary cube has been replaced by the half-cylinder.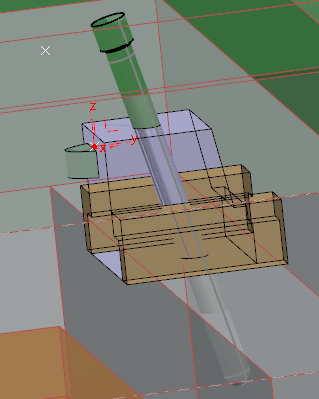
Whenever possible, the temporary external engineering connections existing in the Adaptive System you are inserting are rerouted automatically in context. See Reconnection in About Adaptive Systems.
Note: As this rerouting is based on the temporary connections of the Adaptive System, that no longer exist after the Adaptive System has been inserted, select a reference of the Adaptive System (thus with the required temporary connections), and not an instance (where the temporary connections no longer exist). - If the automatic rerouting of the engineering connections failed, a message and a context toolbar are displayed. Click
 and follow the instructions that appear to reroute the engineering connections manually.
and follow the instructions that appear to reroute the engineering connections manually. - In case of failure, click and follow the instructions.