Balancing Fasteners Across the Resources of a Line | ||||||
|
| |||||
-
From the Analysis Commands section of the action bar, click Fastener Balancing
 .
The Spot Balancing Scenario dialog box appears.
.
The Spot Balancing Scenario dialog box appears.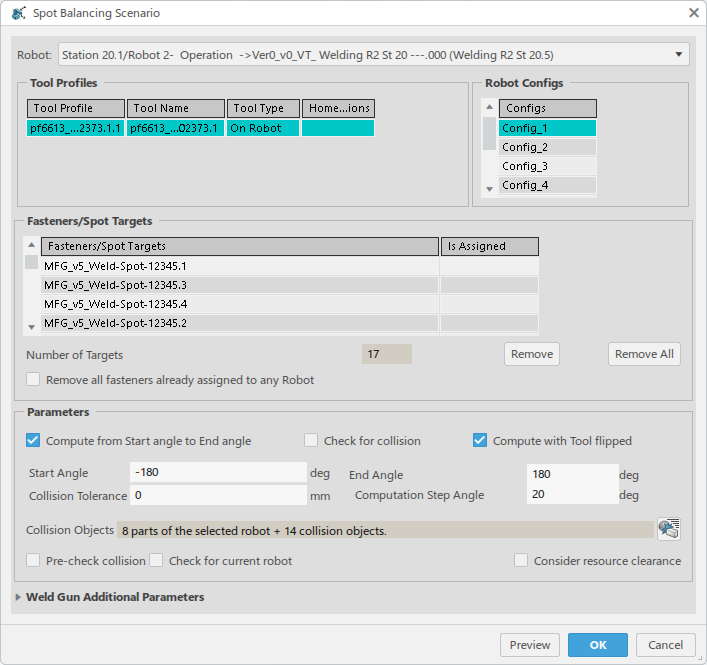
-
In the Tool Profiles section, the current tool mounted on the
robot is displayed. Double-click the cell in the Home Positions to
specify the Home positions to be considered during simulation.

From the Home Positions section, you can check the robot and gun accessibility for the specified fasteners with the Open and Close home positions. Select one or both of the available home positions in the list. You can select multiple positions by holding the Ctrl key as you make the selections.
-
In the Robot Configs section, define all of the configurations
of the robot to be considered during simulation.
-
In the Fasteners/Spot Targets section, the list of welds to be
considered for the current robot is populated based on product flow and build-up. You can
add welds/fasteners by selecting them in the work area or
tree.
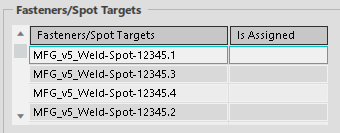
- Number of Targets displays the number of fasteners currently in the list.
- You can select specific fasteners in the list and click Remove to remove them from the list.
- Remove All removes all fasteners from the list.
- When selected, Remove all fasteners already assigned to any Robot removes such fasteners from the analysis.
-
In the Parameters frame, select Compute from Start
angle and End angle to force the computation from the specified
Start Angle to End Angle even if a
feasible solution is found. When not selected, the computation for a fastener/weld stops
as soon as a feasible solution is found.

-
Collision objects indicates the number of objects that are checked
for collision. To edit/view the collision list, select Edit the list of
collision objects
 .
.
The Manage Collision Objects dialog box appears.
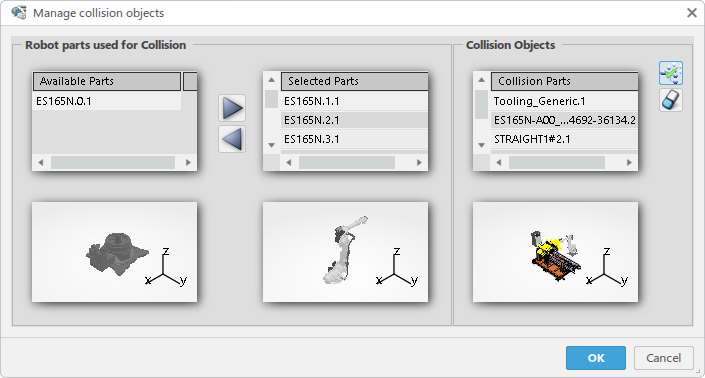
In the Robot parts used for collision frame:
- By default, the Selected Parts list contains all the parts of the robot except its base, and Available Objects list contains only the robot base.
- Objects in each of the lists are displayed in the respective viewer below each list.
- You can move any object between Available Parts and
Selected Parts lists using the arrow buttons
 and
and  , or by double
clicking the object to move in the viewer.
, or by double
clicking the object to move in the viewer. - Selected objects are cross-highlighted between entries in the list, the viewer below the list, and in the work area.
In the Collision objects frame:
- By default, Include all Objects
 is enabled. This means the Collision Parts list includes all
of the objects except for those objects in the Robot parts used for
Collision list.
is enabled. This means the Collision Parts list includes all
of the objects except for those objects in the Robot parts used for
Collision list. - You can remove any part from the list if that part should not be considered for
collision analysis by selecting the object followed by Remove
object
 .
. - You can empty the Collision objects list by deselecting
Include all objects
.
Click OK to accept any changes made and close the Manage Collision Objects dialog box. Collision objects in the Spot Analysis Scenario dialog is updated with the proper number of objects.
-
For Servo weld guns, you can expand Weld Gun Additional
Parameters to reveal options for Gun Open Clearance
and Gun Tip Abrasion.

Default values for Weld Gun Additional Parameters can be defined in
-
Click OK.
A new scenario is created in the Scenarios side tab.
-
Click Simulate and Generate Results
 to simulate the scenario.
to simulate the scenario.
Simulations are performed station by station.
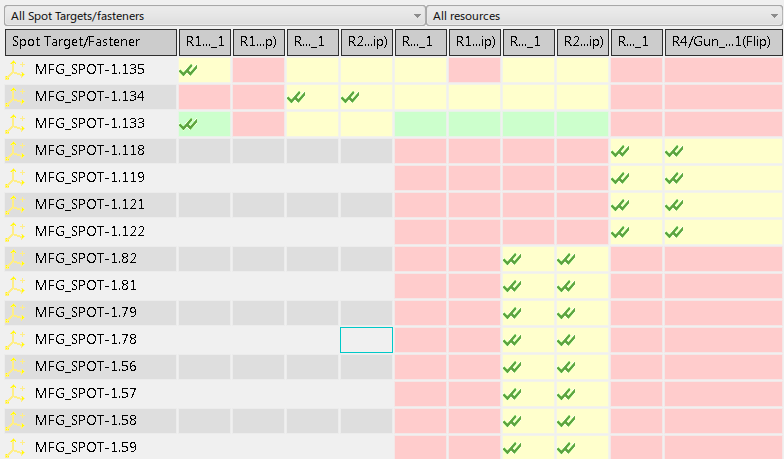
Once complete, results are generated in the Results side tab.

-
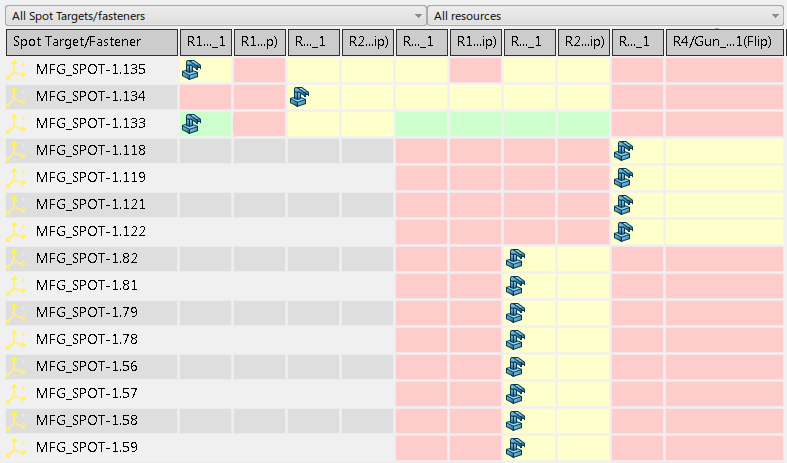
Click Auto Assign
 to help balance
the fasteners automatically by assigning welds that are assignable to only a single
resource first. The remaining welds are distributed between assignable resources, taking
the load on that resource into consideration.
to help balance
the fasteners automatically by assigning welds that are assignable to only a single
resource first. The remaining welds are distributed between assignable resources, taking
the load on that resource into consideration.