Transforming Tags | |||||
|
| ||||
-
From the Setup section of the action bar, click Manipulate Tags
 You are prompted to select a tag, tag group, or robot task.
You are prompted to select a tag, tag group, or robot task. -
Select a task, or one or more tags.
Upon making a selection, the orientation Robot is snapped according to the default Snap 3D Robot Handle option and the context toolbar is displayed.
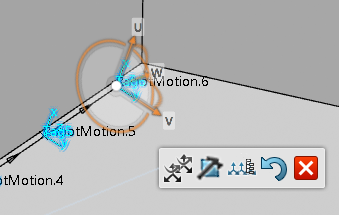
The Transform dialog box also appears.

You can show or hide the Transform dialog box by clicking Show Command Preferences
 in the context toolbar.
in the context toolbar. You can also select Display Sub Tree
 in the context toolbar to display the selected targets highlighted in a tree view.
in the context toolbar to display the selected targets highlighted in a tree view. 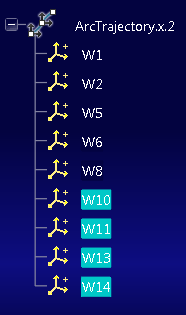
If subsequent selections are made, the orientation Robot snaps to the last selected target.
-
In the Transform dialog box, select Joint Delta
Values.
The Delta Joint Values dialog box appears.

-
Specify joint values for the commands of the robot, and click
 to apply.
to apply.
-
In the Transform dialog box, select Check
Reachability.
The Reach dialog box appears. The Reachability Results tab indicates the status of the all tasks and trajectories analyzed for reachability. The Reachability Analysis tab provides the status of each selected target.

-
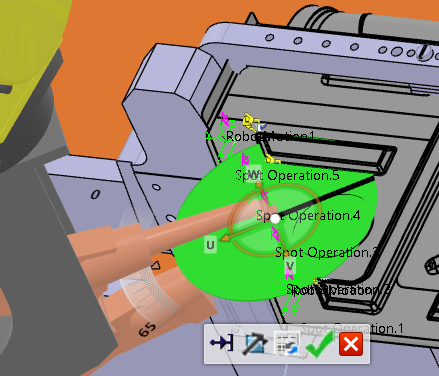
In the Reachability Analysis tab, you can select
Jog
 to
display the Jog panel, and select Reach Disc
to
display the Jog panel, and select Reach Disc
 to display the reach disc at selected targets.
to display the reach disc at selected targets.
The Reach context toolbar appears.
The Reach context toolbarcontext toolbar provides commands for:
- Compute
 recomputes the reachability status after adjusting one or more
targets.
recomputes the reachability status after adjusting one or more
targets. - Reach Options
provides options for enabling partial reach and clash mode, and allows you to
customize the colors that are display for reach and clash status.
- Update Target
 saves the
position of a modified target.
saves the
position of a modified target.
- Compute
-
Once the targets are oriented correctly, click Exit
 .
.
You can click Reset Local or Last Changes
 to revert any
changes that have been made.
to revert any
changes that have been made.
The tags have the desired orientation.