 from a drilling and riveting or milling operation dialog box.
from a drilling and riveting or milling operation dialog box.Add a Robot Motion
You can use the Multi-Motion Editor and Robot to add a robot motion.
- In the Multi-Motion Editor, select a linking motion.The Robot snaps to the selected motion.

-
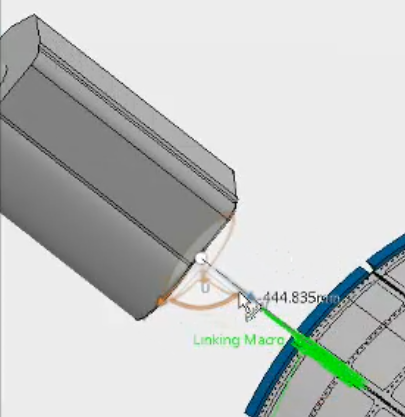
Drag a Robot
axis in the direction you want.
-
From the context toolbar, click Insert Cartesian Target
 .
.
The new motion appears as a Robot Motion in the Multi-Motion Editor.