Generating Surface Tasks | |||||
|
| ||||
Click Play to watch the video:
-
From the Surface section of the action bar,
click Generate Robot Task
 .
.
-
In the work area,
select a robot.
The Create Operations panel appears.

Task displays a default name for the new task being created. You can rename it as required in this field.
Controller displays the controller for the selected robot.

-
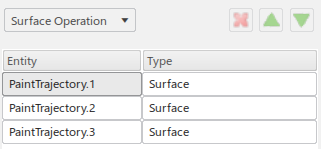
Select one of more trajectories.
Each selected trajectory appears in the list in the Create Operations panel.
You can click
 to selected
trajectories from the list, and click
to selected
trajectories from the list, and click  and
and  to move
a trajectory up or down.
to move
a trajectory up or down. -
In the Trajectory Parameters section, you can select a
Tool Profile and Tracking Profile from the
respective lists.
-
Optional: In the Trigger Parameters section, you can
define trigger points to start and stop the paint gun for each stroke.
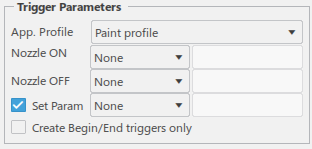
There are three types of actions for triggers:
- Nozzle ON: The Nozzle ON trigger instruction is created before the first process point of every stroke if the trigger has a condition. It is created after the first process point of every stroke if the trigger has no condition.
- Nozzle OFF: The Nozzle OFF trigger instruction is created before the last process point of every stroke if the trigger has a condition. It is created after the last process point of every stroke if the trigger has no condition.
- Set Param: When selected, brushes enabled in the paint profile are used only by the Set Param trigger. Otherwise, brushes enabled in the paint profile are used by Nozzle ON triggers.
- When selected, a trigger instruction is created at the beginning and end of the task/sequence, but not at the beginning/end of each stroke.
- Select the App. Profile to use, or accept the default selection displayed.
-
From the following four types, select a trigger condition for Nozzle
ON, Nozzle OFF and Set
Param, and enter a value for each:
- None (default): The nozzle is turned on at the first/last process point.
- Time: The action is triggered before (if time value specified is negative) or after (if the time value specified is positive) after the specified time.
- Distance: The action is triggered before (if distance value is negative) or after (if distance value is positive) the first/last process point.
- Plane: A plane is created at the specified distance and the action is triggered when TCP cuts the plane.
-
Select Target for Start Position to create a joint motion at the
beginning and end of the task.
A tag is created at the current TCP, and is used as the target for both of the created motions. -
Click OK to create the task.
The new task appears in the Behavior side tab of the browser.