Generating a Collision-Free Path | |||||
|
| ||||
-
In the Point Fastening section of the action bar,
click Automatic Collision Avoidance
 .
The system prompts you to select a task, or a resource having one or more tasks.Note: Drill Rivet Sequence tasks are not supported by this command.
.
The system prompts you to select a task, or a resource having one or more tasks.Note: Drill Rivet Sequence tasks are not supported by this command. -
Select a robot task.
The Automatic Collision Avoidance dialog box appears, and displays the list of operations for the selected task and an initial Collision status of Not computed for each.

-
In the Automatic Collision Avoidance dialog box, click
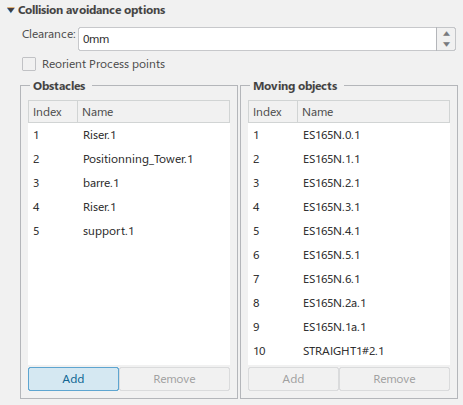
Collision avoidance options.
Options appear that allow you to:
- Set a minimum Clearance for collision.
- Specify a list of objects that are considered Obstacles to avoid.
- Specify a list of moving objects that are considered when computing the collision status.
-
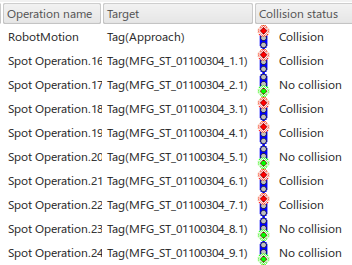
Click Compute status to determine the initial collision status
for each operation.
The Collision status is updated for each operation.
-
Click Compute avoidance to update the task to avoid collisions
based on the options that you have specified.
The Collision status is updated for each solved collision.
