You can edit sketches using Robot instead of using the transformation commands like Translate, or Rotate. You can also replicate your sketch using this.
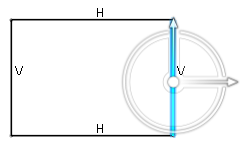
The Robot is placed at the lower-right corner of the work area.
The Robot is zoomed in.
A blue sphere appears when you hover the pointer over the origin. Using this sphere, you can manipulate the Robot to place it on the objects that need translation, or rotate the objects around it.
Using the sphere, drag and drop the Robot on the geometry of the sketch over the object which requires translation.
The object is highlighted in blue.
The Robot aligns itself in such a way that one of its axes is oriented along the geometry of the object or tangentially to it (in curves) and the other axis is normal to it.
Tip:
You can also preselect one or more objects before you place the Robot.
Orientation of Robot along straight edge
Orientation of Robot along curve
Drag the Robot
to get the required translation. You can drag by the following methods:
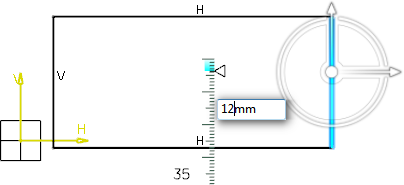
Drag any of the axes to translate the geometry along the direction of the axis. A ruler appears to display the value of displacement.
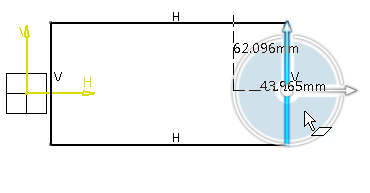
Drag the preferential plane to translate along the orthogonal directions in the work area.
Translation using axis
Translation using preferential plane
The displacement of the Robot is indicated as you drag it with respect to its origin. The object is translated with respect to the displacement of the Robot.
A negative displacement indicates the motion of the object in a direction opposite to the Robot orientation.
During translation using the preferential plane, the displacement along both the axes is indicated.
During translation using preferential axes, you can select the displacement value on the ruler and enter a precise value. Translation by providing displacement value
Important:
The dimensional, or geometrical constraints are retained, removed, or modified to accommodate the the translation of selected objects.
When you achieve the required translation, release the Robot.
Using the sphere, drag and place the Robot anywhere in the work area.
The Robot returns to its original position at the lower-right corner of the work area.
The sketch is modified by translation using the Robot.
Rotate using Robot
You can rotate a sketch using Robot.
Move your pointer over the Robot.
The Robot is placed at the lower-right corner of the work area.
The Robot is zoomed in.
A blue sphere appears when you hover the pointer over the origin. Using this sphere, you can manipulate the Robot to place it on the objects that need translation, or rotate the objects around it.
Using the sphere, drag and place the Robot on the geometry of the sketch over the object which requires rotation.
The object is highlighted in blue.
The Robot aligns itself in such a way that one of its axes is oriented along the geometry of the object or tangentially to it (in curves) and the other axis is normal to it.
Tip:
You can also preselect one or more objects before you place the Robot.
Drag the Robot
by its external arc to get the required rotation.
Rotation using outer arc
The angle by which the Robot moves is indicated as you drag it with respect to its origin. The object is rotated with respect to this angular displacement of the Robot.
Note:
During rotation, you can select the angular displacement value on the ruler and enter a precise value.
Rotation by providing angular displacement
Important:
The dimensional, or geometrical constraints are retained, removed, or modified to accommodate the the rotation of selected objects.
When you achieve the required rotation, release the Robot.
Using the sphere, drag and place the Robot anywhere in the work area.
The Robot returns to its original position at the lower-right corner of the work area.
The sketch is modified by translation using the Robot.
Replicating the Sketch using Robot
You can create replicas of the translated or rotated sketch.
Press Ctrl when you drag the Robot while translating or rotating an object.
When you achieve the required translation or rotation, release the Robot.
The Count toolbar appears.
Enter the number of replicas you require to create.
The default number of replicas you can create is two.
Press Enter.
The replicas are created at the same distance (translation) or angle of rotation (rotation) as you define.Replicas of the original sketch
Important:
The Parameters for Robot Manipulation are unavailable for edition.
Only movable geometries can be transformed. The absolute axis of the sketch itself is unavailable for transformation.
Any associative projected or intersected 3D elements in the sketch plane are unavailable for transformation. The Robot cannot move any use-edge geometries.
If you undo or redo, the transformed geometries can be undone or redone. The position of the Robot remains unchanged.