Manipulating your Network | ||
| ||
-
From the Branch section of the action bar,
click Network Manipulation Assistant
 .
.
-
In the work area,
select one of the following:
- A product. The branches from every electrical branch geometry within the product are selected.
- An electrical branch geometry. All the branches within the electrical branch geometry are selected.
- A branch.
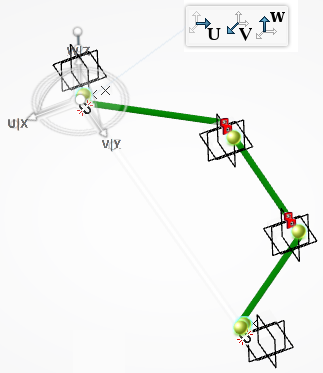
Note: You can multiselect elements or select several elements one by one.The Robot is snapped to the network. In the 3D area, your selection is highlighted and an icon is displayed on broken connections: .
. 
Tips: - To remove elements from your selection, click Remove Mode
 on the context toolbar, and then select a product, an electrical branch geometry, or a branch.
on the context toolbar, and then select a product, an electrical branch geometry, or a branch. - To add elements to your selection, select a product, an electrical branch geometry, or a branch.
- To snap the Robot to another position, click a branch section, a route point, or a branch point.
-
Define if the supports belonging to your selection are moved during the
translation:
By default, all supports are fixed.
Option Description Fix individual support 
The selected support is not translated. Free individual support 
The selected support is translated. Free all supports 
All supports within your selection are translated. Fix all supports 
No supports within your selection are translated. 
-
Move the Robot along one of its axis to position the network.

-
To validate your manipulations, click Execute
 on the context toolbar or press Enter.
The Impact Analysis Tool panel appears and indicates in a table the disconnections resulting from your manipulations.
on the context toolbar or press Enter.
The Impact Analysis Tool panel appears and indicates in a table the disconnections resulting from your manipulations. -
To manage the disconnections, do one of the following:
- To reconnect a single branch, click
 in
the branch's row.
in
the branch's row. - To reconnect all the branches, click in
the table's header.
A preview of the extended branches is displayed.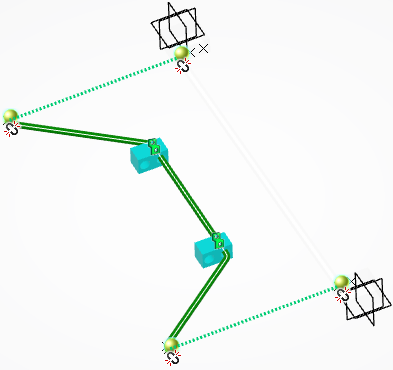
- To reconnect a single branch, click
The shape of your network is updated.

Important:
|

