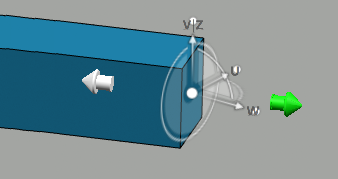
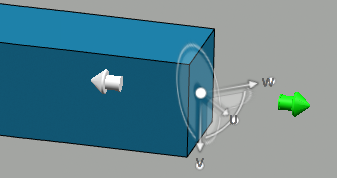
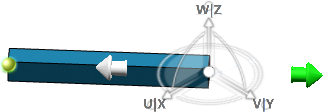
Default Orientation
By default, the z-axis is the orientation of the Robot and its base is the XY plane.
Default OrientationBy default, the z-axis is the orientation of the Robot and its base is the XY plane. Manual OrientationThe default orientation can be modified manually by manipulating the Robot's handle.  Geometric OrientationThe Robot can be oriented precisely by aligning its axis in the same direction as a geometric element belonging to your assembly. Dragging and dropping the Robot on a geometric element orients the axis of the Robot on the same vector as the chosen element. The geometric element can be:
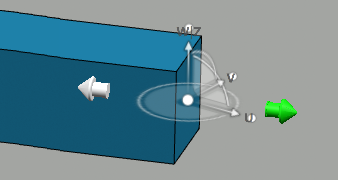
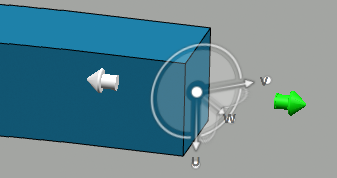
Orientation with a Plane
When orienting the Robot with a plane, the axis is aligned with the plane's normal vector.
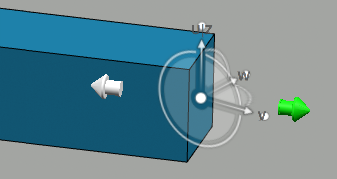
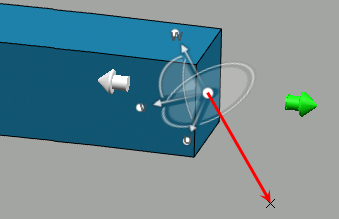
Orientation with a Line
When orienting the Robot with a line, the axis is aligned with the vector of the line direction.
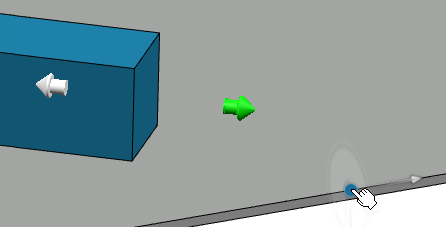
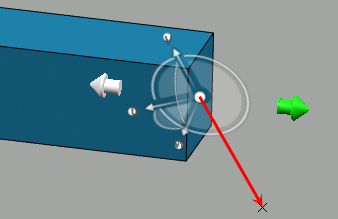
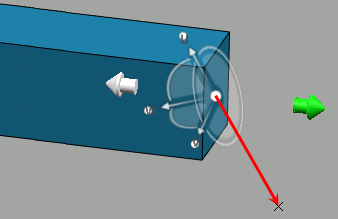
Orientation with a Point
When orienting the Robot with a point, the axis is aligned with the vector passing through the Robot's position and the point. In our example, the vector is symbolized in red.
| |||||||||||||||||||||||||||||