is a linear perturbation procedure that gives the linearized dynamic
response of a model to user-defined random excitation; and
uses the set of modes extracted in a previous eigenfrequency
extraction step to calculate the power spectral densities of response variables
(stresses, strains, displacements, etc.) and the corresponding root mean square
(RMS) values of these same variables.
Random response analysis predicts the response of a system that is subjected
to a nondeterministic continuous excitation that is expressed in a statistical
sense by a cross-spectral density matrix. Since the loading is
nondeterministic, it can be characterized only in a statistical sense;
Abaqus/Standard
assumes that the excitation is stationary and ergodic. These statistical
measures are explained in detail in
Random response analysis.
The random response procedure can, for example, be used to determine the
response of an airplane to turbulence, the response of a car to road surface
imperfections, the response of a structure to jet noise, or the response of a
building to an earthquake.
In the most general case the excitation is defined as a frequency-dependent
cross-spectral density (CSD) matrix. Except in
cases involving moving noise or user subroutine
UCORR, it is assumed that for a given load case the
CSD matrix can be separated into a product of
a frequency-dependent, complex-valued scalar function and a
frequency-independent, complex-valued, spatial correlation matrix. This
assumption helps reduce both the computational time and the amount of required
user input but implies that each element of the
CSD matrix in a given load case has the same
frequency dependence. You can define a different frequency dependence for each
load case, but the loads in one load case will not be correlated with loads in
another. Consequently, the system CSD matrix
is assembled by simply summing (superimposing) the
CSD matrices of the individual load cases.
The frequency-dependent scalar function can be composed of a weighted sum of
user-defined, complex-valued, frequency functions. These user-defined frequency
functions are specified in units of power spectral density. You assign weights
to each frequency function as well as specify properties of the spatial
correlation matrix that defines the correlation between excitations at
different locations and in different directions for a particular load case.
Frequency functions and correlations are discussed below; see
Defining the Frequency Functions
and
Defining the Correlation.
The loads can be defined as concentrated point loads, as distributed loads,
as connector element loads, or as base motion excitations, as described below
in
Boundary conditions
and
Loads.
Multiple, uncorrelated load cases can be defined for concentrated point loads,
connector loads, and base motions. Load case 1 is reserved for all distributed
loads defined in a particular step. In these steps load case 1 cannot be used
for any concentrated point load, connector load, or base motion. Thus, there
cannot be any correlation between distributed loads and any other load.
Moreover, base motion excitations are assumed to be statistically independent
(no correlation) with any other load type even when the same load case number
is used. The concentrated point and connector element loads are assumed to be
correlated if the same load case number is used.
The random response procedure is based on using a subset of the modes of the
system, which must first be extracted by using the eigenfrequency extraction
procedure. The modes will include eigenmodes and, if activated in the
eigenfrequency extraction step, residual modes. The number of modes extracted
must be sufficient to model the dynamic response of the system adequately,
which is a matter of judgment on your part. The model can be preloaded prior to
the eigenfrequency extraction. Initial stress effects are included in the
stiffness used in the eigenfrequency extraction if geometric nonlinearities are
included in the general analysis procedure used to apply the preloads (General and Perturbation Procedures).
The random response of the model is expressed as power spectral density
values of nodal and element variables, as well as their root mean square
values.
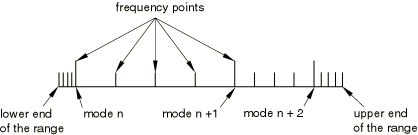
Defining the Frequency Range
You specify the frequency range of interest for the random response
procedure. The response is calculated at multiple points between the lowest
frequency of interest and the first eigenfrequency in the range, between each
eigenfrequency in the range, and between the last eigenfrequency in the range
and the highest frequency in the range as illustrated in
Figure 1.
The default number of calculation points in each interval is 20; you can change
this number when you define the step. Accurate RMS values can be obtained only
if enough points are used so that
Abaqus/Standard
can integrate accurately over the frequency range. The bias function allows the
points on the frequency scale to be spaced closer together at the
eigenfrequencies, thus allowing detailed definition of the response close to
resonant frequencies and more accurate integration.
Figure 1. Division of range using modes and 5 calculation points.
Input File Usage
RANDOM RESPONSElower_freq_limit, upper_freq_limit, num_calc_pts, bias_parameter, freq_scale
The Bias Parameter
The bias parameter can be used to provide closer spacing of the result
points either toward the middle or toward the ends of each frequency interval.
Figure 2
shows a few examples of the effect of the bias parameter on the frequency
spacing.
Figure 2. Effect of the bias parameter on the frequency spacing for a number of
points .
The bias formula used to calculate the frequency at which results are
presented is as follows:
where
y
;
n
is the number of frequency points at which results are to be given;
k
is one such frequency point ();
is the lower limit of the frequency interval;
is the upper limit of the interval;
is the frequency at which the kth results are given;
p
is the bias parameter value; and
is the frequency or the logarithm of the frequency, depending on the chosen
frequency scale.
A bias parameter, p, that is greater than 1.0 provides
closer spacing of the results points toward the ends of each frequency interval
(as shown in the examples above), while values of p that
are less than 1.0 provide closer spacing toward the middle of each frequency
interval. The default value of the bias parameter for random response analysis
is 3.0.
Defining the Frequency Functions
To define the random loading, you specify a frequency function and a
cross-correlation definition that refers to the frequency function. The
frequency functions are defined as model data (i.e., they are step independent)
and must be named. A log-log scale is used in interpolating between the given
values.
The type of units in the CSD matrix of the
excitation are specified as part of the frequency function definition. The
default type is power units. If the CSD matrix
of the excitation is due to base motion, the units must be in
g units and you should define the acceleration of gravity.
Alternatively, decibel units can be specified; this type of units is explained
below.
Input File Usage
Use one of the
following options to define the frequency function:
Defining the Cross-Spectral Density Matrix in Decibel Units
In
Abaqus/Standard
the decibel value
is related to the frequency function
by the following full octave band conversion formula:
where
is the user-specified reference power and is the
midband frequency (see
Table 1).
Table 1. Standard octave bands.
Band number
Band center (frequency, Hz)
1
1.0
2
2.0
3
4.0
4
8.0
5
16.0
6
31.5
7
63.0
8
125.0
9
250.0
10
500.0
11
1000.0
12
2000.0
13
4000.0
14
8000.0
15
16000.0
Hence, the frequency function follows from the function defined in decibel
units as
If you have data in terms of an alternative frequency scale (e.g., one-third
octave band), an equivalent full octave band power reference value can be
obtained as described in
Random response analysis.
in decibels must be specified as a function of the frequency band; the
associated midband frequencies are given in
Table 1.
Alternate Methods for Defining Frequency Functions
You can define a frequency function in an external file or in a user
subroutine.
Defining the Frequency Function in an External File
The data to define a frequency function can be contained in an external
file.
Any data lines given will be ignored if the USER parameter is specified.
Defining the Correlation
You define the cross-correlation between the applied nodal loads or base
motions. You can also assign scaling (weight) factors to the frequency
functions through the cross-correlation definition. Distributed loads are
converted to equivalent nodal loads, which are treated as individual point
loads with respect to the cross-correlation. The cross-correlation is defined
in the random response step and references a particular load case number and
frequency function.
Three types of correlation can be defined: correlated, uncorrelated, and
moving noise. As many correlations as needed to define the random loading can
be specified unless the moving noise type is chosen, in which case only one
correlation can appear in the step definition.
For the correlated type all terms in the cross-spectral density matrix
are considered, which implies that the loads on all degrees of freedom within
the load case are fully correlated (statistically dependent on each other).
For the uncorrelated type only diagonal terms in the cross-spectral
density matrix are considered, which implies that no correlation exists between
the load on one degree of freedom and the load on another. You should exercise
caution when choosing the uncorrelated type with distributed loads since the
equivalent nodal forces would be uncorrelated with each other (statistically
independent).
For the moving noise type the terms in the correlation matrix depend on
the relative position of the points where the loads are applied. This type can
be used only in conjunction with concentrated point loads and distributed
loads. In addition, the moving noise formulation assumes that the frequency
function referenced by the cross-correlation defines a reference power spectral
density function of the noise source. (It is a reference power spectral density
because it can later be scaled by the magnitude of the loadings specified as
distributed, concentrated point, or connector element loads.) Since the power
spectral density is real-valued for real-valued variables, the frequency
function must not contain imaginary terms when used with the moving noise type
of cross-correlation.
Input File Usage
Use one of the
following options to define the correlation:
For the moving noise type the reference to the power spectral
density function must be given on each data line.
Specifying Whether the Correlation Matrix Is Complex
For correlated or uncorrelated cross-correlations you can specify whether or
not both real and imaginary terms will be included in the spatial correlation
matrix. This specification does not affect the imaginary terms given for the
power spectral density frequency function.
Input File Usage
Use one of the
following options:
CORRELATION, TYPE=CORRELATED, COMPLEX=YES or NO,
PSD=nameCORRELATION, TYPE=UNCORRELATED, COMPLEX=YES or NO,
PSD=name
Alternate Methods for Defining a Correlation
You can define a correlation in an external input file or in a user
subroutine.
Defining the Correlation in an External Input File
The data to define a correlation can be contained in an external input
file.
Simple excitations, such as uncorrelated white noise, are easily defined.
Excitations involving more complicated correlations, including cases where the
elements of the CSD matrix have different
frequency dependencies, can be defined through user subroutine
UCORR. If the user subroutine is specified, only the load case
number must be entered as part of the correlation definition. A user subroutine
cannot be used to define a moving noise correlation.
For uncorrelated cross-correlations only the diagonal terms of the
correlation matrix specified in
UCORR will be used. The combination of the cross-correlation
with the various kinds of applied loads is discussed in more detail below.
Input File Usage
Use one of the
following options:
CORRELATION, TYPE=CORRELATED, USER, COMPLEX=YES or NO, PSD=nameCORRELATION, TYPE=UNCORRELATED, USER, PSD=name
Selecting the Modes and Specifying Damping
You can select the modes to be used in modal superposition and specify
damping values for all selected modes.
Selecting the Modes
You can select modes by specifying the mode numbers individually, by
requesting that
Abaqus/Standard
generate the mode numbers automatically, or by requesting the modes that belong
to specified frequency ranges. If you do not select the modes, all modes
extracted in the prior eigenfrequency extraction step, including residual modes
if they were activated, are used in the modal superposition.
Input File Usage
Use one of the
following options to select the modes by specifying mode numbers:
Damping is almost always specified for a random response analysis (see
Material Damping).
If damping is absent, the response of a structure will be unbounded if the
forcing frequency is equal to an eigenfrequency of the structure. To get
quantitatively accurate results, especially near natural frequencies, accurate
specification of damping properties is essential. The various damping options
available are discussed in
Material Damping.
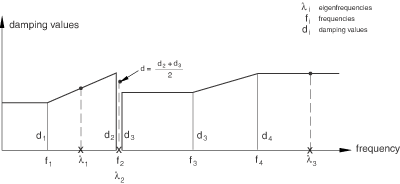
You can define a damping coefficient for all or some of the modes used in the
response calculation. The damping coefficient can be given for a specified mode
number or for a specified frequency range. When damping is defined by
specifying a frequency range, the damping coefficient for a mode is
interpolated linearly between the specified frequencies. The frequency range
can be discontinuous; the average damping value will be applied for an
eigenfrequency at a discontinuity. The damping coefficients are assumed to be
constant outside the range of specified frequencies.
Input File Usage
Use the following
option to define damping by specifying mode numbers:
Figure 3. Damping values specified by frequency range.
Rules for Selecting Modes and Specifying Damping Coefficients
The following rules apply for selecting modes and specifying modal damping
coefficients:
No modal damping is included by default.
Mode selection and modal damping must be specified in the same way,
using either mode numbers or a frequency range.
If you do not select any modes, all modes extracted in the prior
frequency analysis, including residual modes if they were activated, will be
used in the superposition.
If you do not specify damping coefficients for modes that you have
selected, zero damping values will be used for these modes.
Damping is applied only to the modes that are selected.
Damping coefficients for selected modes that are beyond the specified
frequency range are constant and equal to the damping coefficient specified for
the first or the last frequency (depending which one is closer). This is
consistent with the way
Abaqus
interprets amplitude definitions.
Initial conditions
It is not appropriate to specify initial conditions in a random response
analysis.
Boundary conditions
It is not possible to prescribe nonzero displacements and rotations directly
as boundary conditions (Boundary Conditions)
in mode-based dynamic response procedures. Therefore, in a random response
analysis the motion of nodes can be specified only as base motion; nonzero
displacement, velocity, or acceleration history definitions given as boundary
conditions are ignored, and any changes in the support conditions from the
eigenfrequency extraction step are flagged as errors. In addition, any
amplitude definitions are ignored in a random response analysis.
The method for prescribing motion in modal superposition procedures is
described in
Transient Modal Dynamic Analysis.
In random response analysis only a single (primary) base can be defined.
Defining Multiple Load Cases
The excitation defined by the base motion is assigned to numbered load
cases. These load cases are then referenced in the cross-correlation
definition. The load cases are associated with frequency functions through the
reference in the cross-correlation definition. Any number of load cases can be
defined, but load case number 1 cannot be used if distributed loads are defined
in the same step.
Converting Base Motion Excitation to a Cross-Spectral Density Matrix
When the excitation is provided by a base motion, it is converted directly
into a cross-spectral density matrix projected onto the eigenspace through the
modal participation factors (see
Natural Frequency Extraction),
giving
where the superscript
* denotes complex conjugate and where
is the modal participation factor for mode
in excitation direction i
(i=1–6);
is the frequency function referenced by the Jth
cross-correlation and defined as a function of the frequency
f in g units;
is a matrix of weight factors indicating the fraction of
to be associated with the correlation between base motion in directions
i and j for load case
I, as described below;
,
1, or 2, depending on whether the base motion corresponding to load case
I is defined in terms of an acceleration spectrum, a
velocity spectrum, or a displacement spectrum (see
Transient Modal Dynamic Analysis);
and
is the user-specified acceleration of gravity for the same power spectral
density frequency function that defines .
If the cross-correlation is defined in user subroutine
UCORR,
is defined in the user subroutine. Otherwise,
for all
if the excitation is correlated or
if the excitation is uncorrelated,
where
is the (complex) value of the weight factor by which to scale the frequency
function
used in load case I.
Loads
The loading for random response analysis is defined in general terms by the
cross-spectral density matrix ,
where f is frequency in cycles per time and the subscripts
and
refer to degree of freedom i at node
N and degree of freedom j at node
M, respectively. Distributed loads are converted to
equivalent nodal loads, which—for the formulation of the correlation matrix—are
treated in the same way as concentrated point loads. The units of
are (force)2 or (moment)2 per frequency. In addition, any
amplitude references on the concentrated point, connector element, or
distributed load definitions are ignored in a random response analysis.
Loads in a random response analysis have three attributes: a force defined
by a concentrated or distributed load (or a base motion), a power spectral
density defined by a frequency function, and correlation coefficients between
degrees of freedom. The correlation coefficients are nondimensional, but the
force and power spectral density values can have units assigned to them. To
maintain the correct units for the random loading, you must define the units in
one of the following ways:
Define nondimensional loads, and define the frequency function using
power units; for example, (force)2 per frequency.
Define loads using force units, and define the frequency function curve
as nondimensional per frequency.
Define base motion using the frequency function curve as
(acceleration)2 per frequency, and define the reference gravity
acceleration as nondimensional.
Define base motion using the frequency function curve as nondimensional,
and define the reference gravity acceleration using gravity units.
Defining Multiple Load Cases
Distributed loads will be assigned automatically to load case number 1. You
assign a concentrated point load or connector element load to a numbered load
case. Any number of concentrated point and connector element load cases can be
specified, but load case number 1 cannot be used for a concentrated point or
connector element load if a distributed load is present in the same step. The
concentrated point, connector element, and distributed load cases are
associated with frequency functions through the cross-correlation definition.
For correlated or uncorrelated cross-correlations, the cross-spectral
density matrix is defined as
where the superscript
* denotes complex conjugate and where
is the load magnitude applied to degree of freedom
i at node N for load case
I;
is the frequency function referenced by the Jth
cross-correlation and defined as a function of the frequency
f in power (force) or decibel units; and
is a matrix of weight factors indicating the fraction of
to be associated with the
cross-correlation term for load case I, as described
below.
If the cross-correlation is defined in user subroutine
UCORR,
is defined in the user subroutine. Otherwise,
for all
if the excitation is correlated or
if the excitation is uncorrelated,
where
is the (complex) value of the weight factor by which to scale the frequency
function
used in load case I.
Moving Noise Loading
For moving noise cross-correlations, the cross-spectral density matrix is
defined as
where
is the load magnitude applied to degree of freedom
i at node N for load case
I;
is the reference power spectral density function associated with load case
I and defined as a function of the frequency
f in power (force) or decibel units;
is the velocity vector of noise propagation given for load case
I; and
are the coordinates of node N.
This definition of moving noise implies that the different noise sources
have no cross-correlation. Therefore, it is most generally used with only one
noise source (
only). In addition, since
is the actual power spectral density of the moving noise source, it must be
defined as a real-valued function.
Predefined fields
Predefined fields, including temperature, cannot be used in random response
analysis.
Material options
As in any dynamic analysis procedure, mass or density (Density)
must be assigned to some regions of any separate parts of the model where
dynamic response is required. The following material properties are not active
during a random response analysis: plasticity and other inelastic effects,
rate-dependent properties, thermal properties, mass diffusion properties,
electrical properties, and pore fluid flow properties (see
General and Perturbation Procedures).
Elements
Other than generalized axisymmetric elements with twist, any of the
stress/displacement elements in
Abaqus/Standard
can be used in a random response analysis (see
Choosing the Appropriate Element for an Analysis Type).
Output
In random response analysis the value of a variable is its power spectral
density; all of the output variables in
Abaqus/Standard
are listed in
Abaqus/Standard Output Variable Identifiers.
Power spectral density values are not available for concentrated and
distributed loads and for SINV.
Options are also provided in random response analysis to obtain root mean
square values for certain variables, as listed below. Total values include base
motion, while relative values are measured relative to the base motion.
Element integration point variables:
RS
Root mean square of all stress components.
RE
Root mean square of all strain components.
Element nodal point
variables:
MISES
Mises equivalent stress..
RMISES
Root mean square of Mises equivalent stress.
For connector
elements, the following element output variables are available:
RCTF
Root mean square of connector total forces.
RCEF
Root mean square of connector elastic forces.
RCVF
Root mean square of connector viscous forces.
RCRF
Root mean square of connector reaction forces.
RCSF
Root mean square of connector friction forces.
RCU
Root mean square of connector relative displacements.
RCCU
Root mean square of connector constitutive displacements.
Nodal
variables:
RU
Root mean square values of all components of the relative
displacement/rotation at a node.
RTU
Root mean square values of all components of the total displacement/rotation
at a node.
RV
Root mean square values of all components of the relative velocity at a
node.
RTV
Root mean square values of all components of the total velocity at a node.
RA
Root mean square values of all components of the relative acceleration at a
node.
RTA
Root mean square values of all components of the total acceleration at a
node.
RRF
Root mean square values of all components of reaction forces and reaction
moments at a node.
No energy values are available for a random response analysis.
To reduce the computational cost of random response analysis, you should
request output only for selected element and node sets.
Abaqus/Standard
will calculate the response for only the element and nodal variables requested.
When MISES or RMISES output is requested,
Abaqus/Standard
stores the needed data in the output database (.odb) file
and
Abaqus/Viewer
does the actual computation of the responses. These computations require
element stress output in the frequency step preceding the random response step.
Note that specifying the name of the element set in the output request in the
random response step has no effect on these two output variables. If MISES or RMISES output for a selected set of elements is desired, the name of
that element set needs to be specified for the element stress output request in
the preceding frequency step. Unlike in other procedures, MISES and RMISES output for random response analysis is computed at the element
nodal points and not at the element integration points.
Input file template
HEADING
…
PSD-DEFINITION, NAME=name, TYPE=typeData lines to define a frequency function (or PSD function for moving noise)
**
STEPFREQUENCYData line to control eigenvalue extractionBOUNDARYData lines to assign degrees of freedom to the primary baseEND STEPSTEPRANDOM RESPONSEData line to specify frequency range of interestSELECT EIGENMODESData lines to define the applicable mode rangesMODAL DAMPINGData line to define modal dampingCORRELATION, PSD=name, TYPE=typeData lines to specify correlation for various excitation load cases (n, p)DLOADData lines to define distributed loadsCLOAD, LOAD CASE=nData lines to define concentrated loads in load case nCONNECTOR LOAD, LOAD CASE=mData lines to define connector loads in load case mBASE MOTION, DOF=dof, LOAD CASE=pData lines to define base motion pEND STEP