ProductsAbaqus/StandardAbaqus/Aqua
In the “near-bottom bending” approach chains, typically 5–10 m (20–30 ft)
long, are attached to the pipeline at intervals along its length. Their weight
then balances the buoyancy devices, which are attached to the pipeline, when
the pipeline is lowered to a position about 3 m (10 ft) from the seabed. The
pipeline is then winched into position at each end, with the lengths of chain
lying on the seabed acting as restraints on the motion and, thus, providing
some control over the process. One of the analyses in this example is the
prediction of configuration and stress in the pipeline throughout such a
“pull-in” process, the usual concern being to accomplish a satisfactory final
configuration without buckling or overstressing the pipeline at any time during
the installation. As a second near-bottom pipeline installation example, the
cable is assumed to remain constant in length and motion is prescribed on the
unattached end, thereby simulating a towing process.
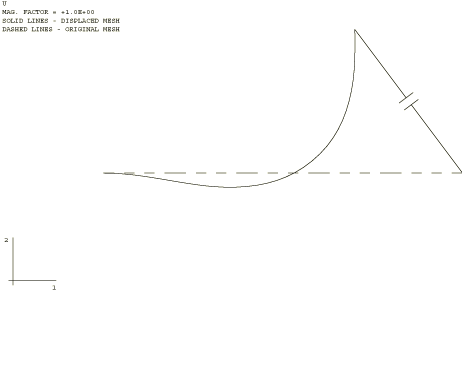
During the pull-in or towing process the chains typically take the
configuration shown in
Figure 1:
a catenary between the attachment point and the seabed, with some length along
the seabed (this part of the chain may not lie in a straight line along the
seabed: its configuration depends on the previous motion). In
Abaqus
this is idealized as a single anchor block on the seabed, connected to the
attachment point by a catenary (Figure 2).
When two-dimensional drag chains are used, the model requires the specification
of two parameters: the horizontal distance, ,
between the attachment point and the anchor block when the system is slipping
(that is, the maximum possible horizontal distance between these points, since
the horizontal force is limited by friction) and this maximum frictional force.
Typically,
is chosen as the horizontal distance between the attachment point and a point
halfway along the horizontal chain lying on the seabed, while the maximum
frictional force is ,
where
is the friction coefficient, w is the weight of the chain
per unit length (in water), and
is the length of chain on the seabed in the actual configuration. The
three-dimensional drag chains can also be used. In this case the model requires
the specification of three parameters: the total length of the chain, the
friction coefficient, and the weight per unit length of chain. The total length
of the chain is the sum of the length of the chain on the seabed and the
suspended length. In addition, for three-dimensional analyses the seabed must
be defined using a rigid surface, which must be flat and parallel to the global
X–Y plane.
This idealization of the drag chains is usually satisfactory for motions
several times larger than typical lengths associated with these chains
().
For small motions (of order )
the model is too idealized, and the chain must itself be modeled. Since the
majority of installation procedures involve considerable motion, the model is
usually adequate.
Problem description
The example used here to illustrate the process consists of a pipe of length
304.8 m (1000 ft), with an outer diameter of 228.6 mm (0.75 ft) and a wall
thickness of 7.62 mm (0.025 ft). This is a rather slender beam, and for this
reason hybrid beam element type B23H is chosen. (The “hybrid” beams are mixed formulation elements
designed for use with very slender or very stiff systems.) One end of the
pipeline is winched into an anchor point that is initially offset 121.92 m (400
ft) to one side of the pipeline and set back 91.44 m (300 ft) from the end of
the pipeline. The other end of the pipeline is assumed to be built in—that is,
already fully attached to some rigid fixture, as indicated in
Figure 3.
There are six equally spaced drag chains on the pipeline, and so for
convenience five elements are used to idealize the pipeline. Drag chains are
attached to the nodes. The chain at the end being winched has a mean length at
slip, ,
of 7.62 m (25 ft) and requires a force of 556 N (125 lb) to slip. The other
chains are all of equal size, with a mean length at slip of 1.524 m (5 ft) and
a slip force of 111 N (25 lb).
For comparison purposes the analysis is also performed using
three-dimensional drag chains. For this case hybrid beam element type B33H is used, and the z-displacements at all of
the beam nodes are restrained to reproduce the two-dimensional case. The
equivalent three-dimensional parameters are obtained based on the description
outlined in
Drag Chains.
The chain at the end of the pipe will have a total length
of 39.9 m (131 ft), a friction coefficient
of 0.3, and a weight per unit length of 58.2 N/m (4.0 lb/ft). The remaining
chains have a total length
of 7.98 m (26.2 ft), a friction coefficient
of 0.1, and a weight per unit length of 1455 N/m (100 lb/ft). The height of the
beam above the seabed, h, is 3.05 m (10 ft). A cylindrical
analytical surface with a fixed reference node is used to simulate the seabed.
The reference node is used as the second node of the DRAG3D element to associate the drag chains with the seabed.
The cable is modeled as a spherical gap element, which provides for an
inextensible cable supporting tension but no compression. The length of the
cable can be changed throughout a step by using a contact interference. This
feature is used here to reduce the length to zero over the step and, thus,
effect the pull-in.
Boundary conditions
For the pull-in analysis the left-hand end of the pipe is assumed to be held
rigidly, including full rotational restraint. For the three-dimensional
analysis the beam nodes are also restrained in the -direction
to simulate the two-dimensional case. The rigid surface reference node is fully
restrained in all six degrees of freedom. The anchor point node is restrained
in all directions in this case, since the pull-in is toward a fixed point.
For the near-bottom tow analysis the pipeline is unrestrained for the
analysis using DRAG2D elements; however, when DRAG3D elements are used, the pipeline is restrained in the
-direction
as described above. The tow is up the y-axis: the anchor
point is fixed in the x-direction, and a motion of 304.8 m
(1000 ft) is prescribed in the y-direction. This implies
that the pipeline has no restraint (and is, therefore, singular) until the drag
chain extends sufficiently to stabilize the pipeline. To overcome numerical
difficulties in the early stages of the analysis, soft springs are attached to
two pipeline nodes. When the system is no longer singular, the solution
proceeds smoothly, with the automatic time incrementation algorithm controlling
the increment size.