Indentation of an elastomeric foam specimen with a hemispherical
punch
This example shows an application of elastomeric foam materials
when used in energy absorption devices.
We consider a cylindrical specimen
of an elastomeric foam, indented by a rough, rigid, hemispherical punch.
Examples of elastomeric foam materials are cellular polymers such as cushions,
padding, and packaging materials. This example uses the same geometry as the
crushable foam model of
Simple tests on a crushable foam specimen,
but with a slightly different mesh.
In addition, design sensitivity
analysis is carried out for a shape design parameter and a material design
parameter to illustrate the usage of design sensitivity analysis for a problem
involving contact.
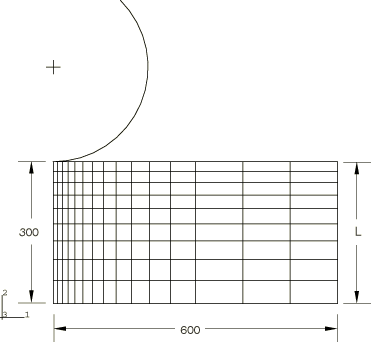
The axisymmetric model (135 linear 4-node elements) analyzed is shown in
Figure 1.
The mesh refinement is biased toward the center of the foam specimen where the
largest deformation is expected. The foam specimen has a radius of 600 mm and a
thickness of 300 mm. The punch has a radius of 200 mm. The bottom nodes of the
mesh are fixed, while the outer boundary is free to move.
A contact pair is defined between the punch, which is modeled by a rough spherical rigid surface,
and a secondary surface composed of the faces of the axisymmetric elements in the contact
region. The friction coefficient between the punch and the foam is 0.8. A point mass of 200
kg representing the weight of the punch is attached to the rigid body reference node. The
model is analyzed in both Abaqus/Standard and Abaqus/Explicit.
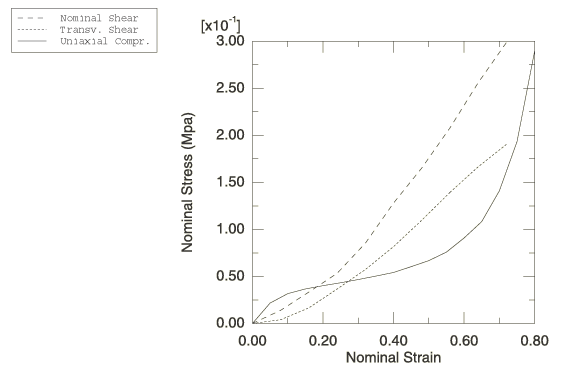
Material
The elastomeric foam material is defined using experimental test data. The
uniaxial compression and simple shear data stress-strain curves are shown in
Figure 2.
Other available test data options are biaxial test data, planar test data, and
volumetric test data. The test data are defined in terms of nominal stress and
nominal strain values.
Abaqus
performs a nonlinear least-squares fit of the test data to determine the
hyperfoam coefficients
and .
For the material used in this example,
is zero, since the effective Poisson's ratio, ,
is zero as specified by the POISSON parameter. The order of the series expansion is chosen to be
2 since this fits the test data with sufficient accuracy. It also provides a
more stable model than the
3 case.
The viscoelastic properties in
Abaqus
are specified in terms of a relaxation curve (shown in
Figure 3)
of the normalized modulus ,
where
is the shear or bulk modulus as a function of time and
is the instantaneous modulus as determined from the hyperfoam model. This
requires Abaqus to calculate the Prony series
parameters from data taken from shear and volumetric relaxation tests. The
relaxation data are specified as part of the definition of shear test data but
actually apply to both shear and bulk moduli when used in conjunction with the
hyperfoam model.
Abaqus
performs a nonlinear least-squares fit of the relaxation data to a Prony series
to determine the coefficients, ,
and the relaxation periods, .
A maximum order of 2 is used for fitting the Prony series. If creep data are
available, you can specify normalized creep compliance data to compute the
Prony series parameters.
A rectangular material orientation is defined for the foam specimen, so
stress and strain are reported in material axes that rotate with the element
deformation. This is especially useful when looking at the stress and strain
values in the region of the foam in contact with the punch in the direction
normal to the punch (direction “22”).
The rough surface of the punch is modeled by specifying a friction
coefficient of 0.8 for the contact surface interaction.
Procedure and loading definitions
Two cases are analyzed. In the first case the punch is displaced statically
downward to indent the foam, and the reaction force-displacement relation is
measured for both the purely elastic and viscoelastic cases. In the second case
the punch statically indents the foam through gravity loading and is then
subjected to impulsive loading. The dynamic response of the punch is sought as
it interacts with the viscoelastic foam.
Case 1
In
Abaqus/Standard
the punch is displaced downward by a prescribed displacement boundary condition
in the first step, indenting the foam specimen by a distance of 250 mm.
Geometric nonlinearity should be accounted for in this step, since the response
involves large deformation. In the second step the punch is displaced back to
its original position. Two analyses are performed—one using the static
procedure for both steps and the other using the quasi-static procedure for
both steps. During a static step the material behaves purely elastically, using
the properties specified with the hyperfoam model. The quasi-static,
direct-integration implicit dynamic, or fully coupled thermal-stress procedure
must be used to activate the viscoelastic behavior. In this case the punch is
pushed down in a period of one second and then moved back up again in one
second. The accuracy of the creep integration in the quasi-static procedure can
be controlled and is typically calculated by dividing an acceptable stress
error tolerance by a typical elastic modulus. In this problem we estimate a
stress error tolerance of about 0.005 MPa and use the initial elastic modulus,
E
2
0.34, to determine an accuracy tolerance of 0.01.
In
Abaqus/Explicit
the punch is also displaced downward by a prescribed displacement boundary
condition, indenting the foam by a depth of 250 mm. The punch is then lifted
back to its original position. In this case the punch is modeled as either an
analytical rigid surface or a discrete rigid surface defined with RAX2 elements. The entire analysis runs for 2 seconds. The actual time
period of the analysis is large by explicit dynamic standards. Hence, to reduce
the computational time, the mass density of the elements is increased
artificially to increase the stable time increment without losing the accuracy
of the solution. The mass scaling factor is set to 10, which corresponds to a
speedup factor of .
The reaction force-displacement relation is measured for both the elastic and
viscoelastic cases.
Case 2
The
Abaqus/Standard
analysis is composed of three steps. The first step is a quasi-static step,
where gravity loading is applied to the point mass of the punch. The gravity
loading is ramped up in two seconds, and the step is run for a total of five
seconds to allow the foam to relax fully. In the second step, which is a
direct-integration implicit dynamic step, an impulsive load in the form of a
half sine wave amplitude with a peak magnitude of 5000 N is applied to the
punch over a period of one second. In the third step, also a direct-integration
implicit dynamic step, the punch is allowed to move freely until the vibration
is damped out by the viscoelastic foam. For a dynamic analysis with automatic
time incrementation, the value of the half-increment residual tolerance for the
direct-integration implicit dynamic procedure controls the accuracy of the time
integration. For systems that have significant energy dissipation, such as this
heavily damped model, a relatively high value of this tolerance can be chosen.
We choose the tolerance to be 100 times a typical average force that we
estimate (and later confirm from the analysis results) to be on the order of 50
N. Thus, the half-increment residual tolerance is 5000 N. For the second
direct-integration implicit dynamic step we bypass calculation of initial
accelerations at the beginning of the step, since there is no sudden change in
load to create a discontinuity in the accelerations.
In the
Abaqus/Explicit
analysis the punch indents the foam quasi-statically through gravity loading
and is then subjected to an impulsive loading. In the first step gravity
loading is applied to the point mass of the punch, and the foam is allowed to
relax fully. The mass scaling factor in this step is set to 10. In the second
step a force in the form of a half sine wave is applied to the punch, and the
dynamic response of the punch is obtained as it interacts with the viscoelastic
foam. In the third step the load is removed, and the punch is allowed to move
freely. Mass scaling is not used in Steps 2 and 3 since the true dynamic
response is sought.
Design sensitivity analysis
For the design sensitivity analysis (DSA)
carried out with static steps in
Abaqus/Standard,
the hyperfoam material properties are given using direct input of coefficients
based on the test data given above. For
2, the coefficients are
0.16245,
3.59734E−05,
8.89239,
–4.52156, and
0.0. Since the quasi-static procedure is not supported for
DSA, it is replaced with the static procedure
and the viscoelastic material behavior is removed. In addition, since a more
accurate tangent stiffness leads to improved sensitivity results, the solution
controls are used to tighten the residual tolerance.
The material parameter
is chosen as one of the design parameters. The other (shape) design parameter
used for design sensitivity analysis, L, represents the
thickness of the foam at the free end (see
Figure 1).
The z-coordinates of the nodes on the top surface
are assumed to depend on L via the equation
.
The r-coordinates are considered to be independent
of L. To define this dependency in
Abaqus,
the gradients of the coordinates with respect to
are given as part of the specification of parameter shape variation.
Results and discussion
This problem tests the hyperfoam material model in
Abaqus
but does not provide independent verification of the model. The results for all
analyses are discussed in the following paragraphs.
Case 1
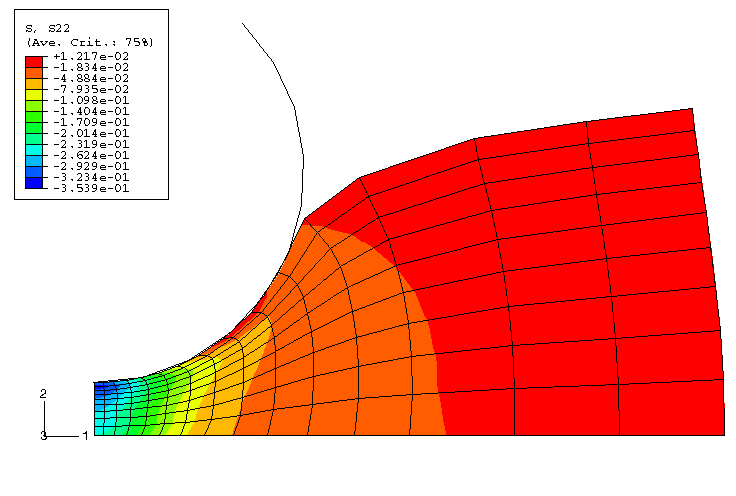
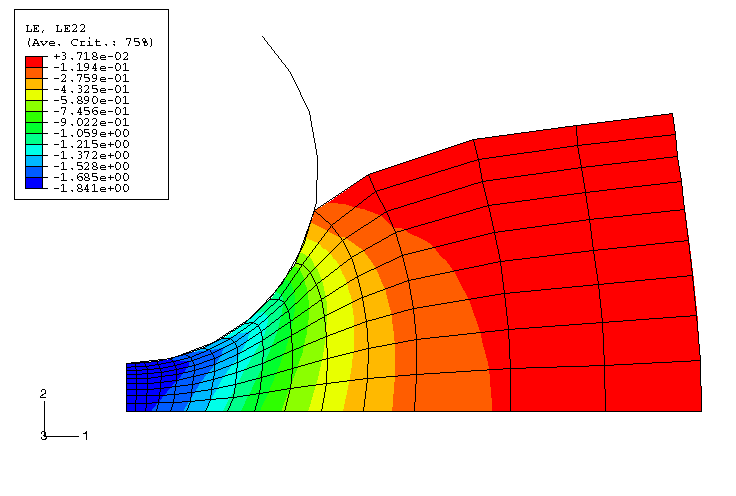
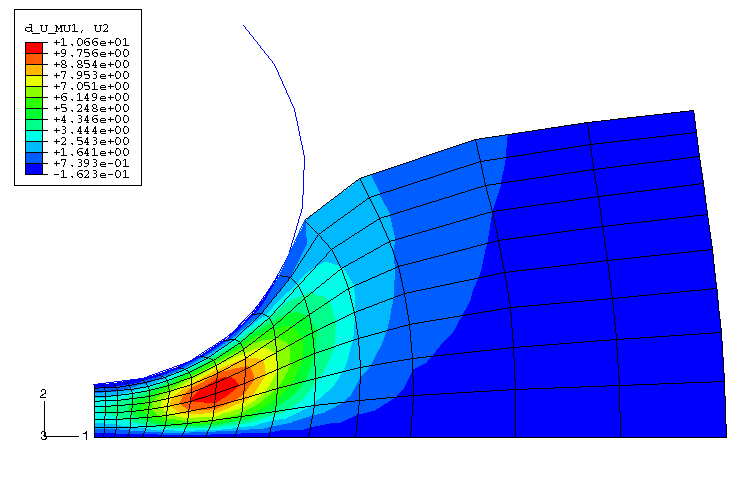
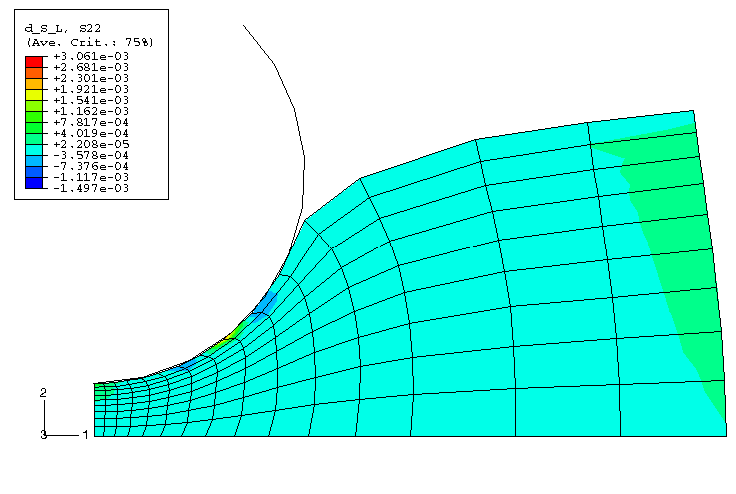
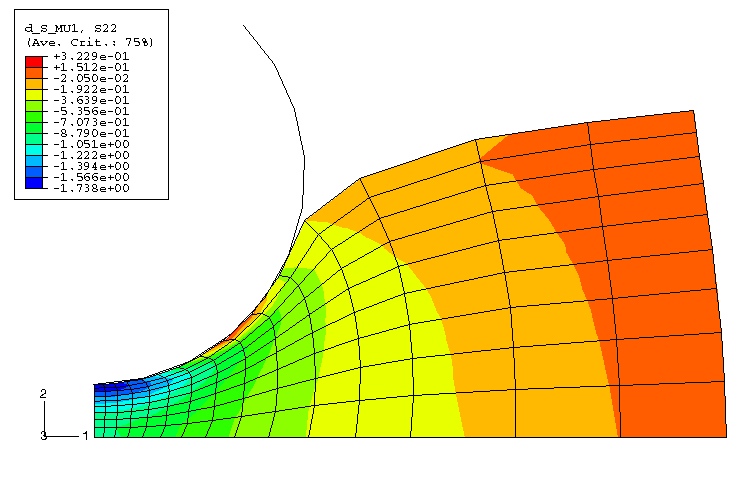
Deformation and contour plots for oriented S22 stress and LE22 strain are shown for the viscoelastic foam in
Figure 4
through
Figure 6
for the
Abaqus/Standard
analysis and
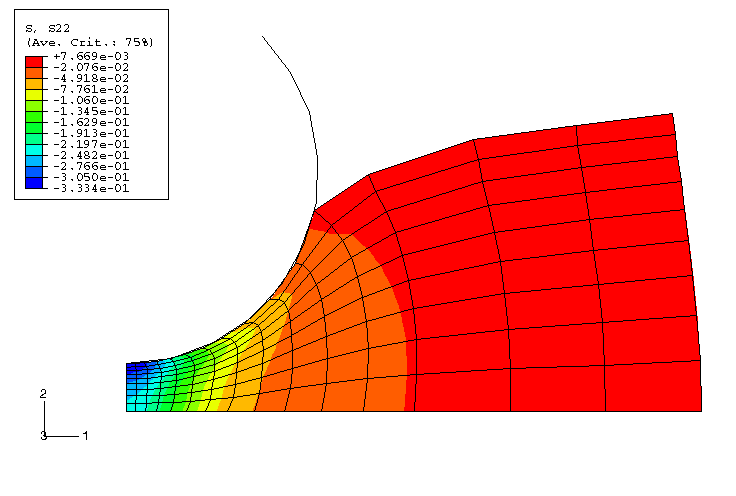
Figure 7
through
Figure 9
for the
Abaqus/Explicit
analysis. Even though the foam has been subjected to large strains, only
moderate distortions occur because of the zero Poisson's ratio. The maximum
logarithmic strain is on the order of −1.85, which is equivalent to a stretch
of
0.16 or a nominal compressive strain of 84%, indicating severe compression of
the foam.
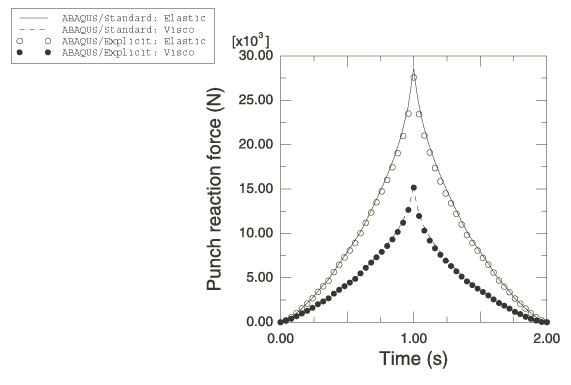
Figure 10
shows a comparison of the punch reaction force histories obtained with
Abaqus/Standard
and
Abaqus/Explicit.
In the viscoelastic case the stresses relax during loading and, consequently,
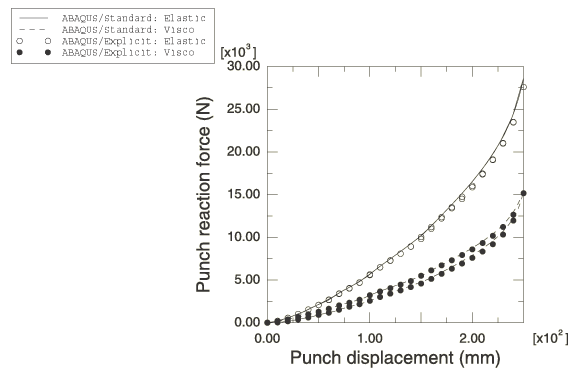
lead to a softer response than in the purely elastic case. A comparison of the
force-displacement responses obtained with
Abaqus/Standard
and
Abaqus/Explicit
is shown in
Figure 11.
The purely elastic material is reversible, while the viscoelastic material
shows hysteresis.
Case 2
Figure 12
shows various displaced configurations during the Case 2 analysis for
Abaqus/Standard
and
Abaqus/Explicit.
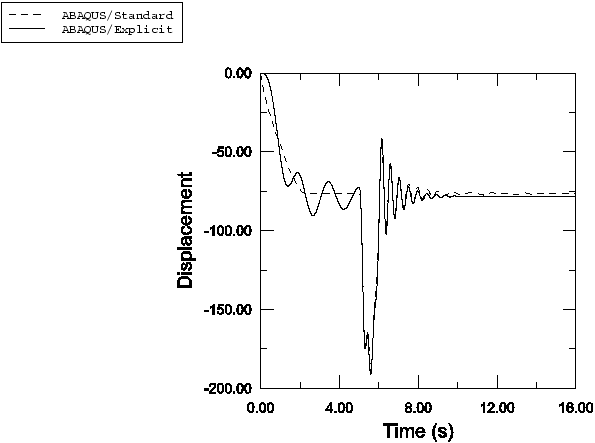
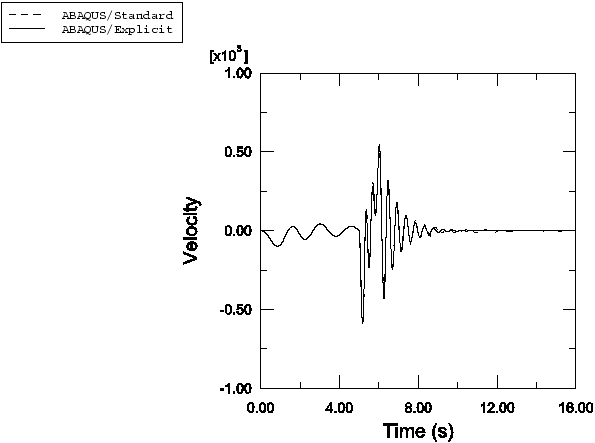
Displacement, velocity, and acceleration histories for the punch are shown in
Figure 13,
Figure 14,
and
Figure 15,
respectively. The displacement is shown to reach a steady value at the stress
relaxation stage, followed by a severe drop due to the impulsive dynamic load.
This is followed by a rebound and then finally by a rapid decay of the
subsequent oscillations due to the strong damping provided by the
viscoelasticity of the foam.
Abaqus/Design
Figure 16
and
Figure 17
show the contours of sensitivity of the displacement in the
z-direction to the design parameters
and ,
respectively.
Figure 18
and
Figure 19
show the contours of sensitivity of S22 to the design parameters L and
,
respectively. To provide an independent assessment of the results provided by
Abaqus,
sensitivities were computed using the overall finite difference
(OFD) technique. The central difference method
with a perturbation size of 0.1% of the value of the design parameter was used
to obtain the OFD results.
Table 1
shows that the sensitivities computed using
Abaqus
compare well with the overall finite difference results.
Case 1 of the
Abaqus/Standard
example (CAX4R elements with hourglass control based on total stiffness) using
elastic properties of the foam, which is statically deformed in two
STATIC steps.
Case 1 of the
Abaqus/Standard
example (CAX4R elements with enhanced hourglass control) using elastic
properties of the foam, which is statically deformed in two
STATIC steps.
Case 1 of the
Abaqus/Standard
example (CAX4R elements with hourglass control based on total stiffness) using
viscoelastic properties of the foam, which is statically deformed in two
VISCO steps.
Case 1 of the
Abaqus/Standard
example (CAX4R elements with enhanced hourglass control) using viscoelastic
properties of the foam, which is statically deformed in two
VISCO steps.
Case 1 of the
Abaqus/Explicit
example using elastic properties of the foam with the punch modeled as an
analytical rigid surface using the subcycling feature.
Table 1. Comparison of normalized sensitivities at the end of the analysis
computed using
Abaqus
and the overall finite difference (OFD)
method.
Normalized sensitivity
Abaqus
OFD
0.4921
0.4922
1.085
1.104
0.006925
0.006927
0.4059
0.4120
0.5084
0.5085
0.3252
0.3207
Figures
Figure 1. Model for foam indentation by a spherical punch. Figure 2. Elastomeric foam stress-strain curves. Figure 3. Elastic modulus relaxation curve. Figure 4. Maximum deformation of viscoelastic foam: Case 1,
Abaqus/Standard. Figure 5. S22 contour plot of viscoelastic foam: Case 1,
Abaqus/Standard. Figure 6. LE22 contour plot of viscoelastic foam: Case 1,
Abaqus/Standard. Figure 7. Deformed plot at 1.0 s: Case 1,
Abaqus/Explicit. Figure 8. S22 contour plot of viscoelastic foam at 1.0 s: Case 1,
Abaqus/Explicit. Figure 9. LE22 contour plot of viscoelastic foam at 1.0 s: Case 1,
Abaqus/Explicit. Figure 10. Punch reaction force history: Case 1. Figure 11. Punch reaction force versus displacement response (loading-unloading
curves): Case 1. Figure 12. Deformed shape plots at the end of visco and dynamic steps: Case 2,
Abaqus/Standard
(left) and
Abaqus/Explicit
(right). Figure 13. Displacement histories of the punch: Case 2,
Abaqus/Standard
and
Abaqus/Explicit. Figure 14. Velocity histories of the punch: Case 2,
Abaqus/Standard
and
Abaqus/Explicit. Figure 15. Acceleration histories of the punch: Case 2,
Abaqus/Standard
and
Abaqus/Explicit. Figure 16. Sensitivities at the end of the analysis for displacement in the
z-direction with respect to
L. Figure 17. Sensitivities at the end of the analysis for displacement in the
z-direction with respect to
. Figure 18. Sensitivities at the end of the analysis for stress S22 with respect to L. Figure 19. Sensitivities at the end of the analysis for stress S22 with respect to .