This example illustrates how
Abaqus/Explicit
can be used to predict the transient response of a large and complicated
structure subject to a shock wave loading resulting from an underwater
explosion (UNDEX).
Modeling large underwater structures subject to shock loads typically leads
to computationally intensive numerical models that require considerable
computing resources. A publicly available full submarine model is modified via
a modeling approach that minimizes the computational costs and obtains an
accurate response in a particular region of interest. Consequently, particular
attention is given to structural details in the respective region of interest,
while simplifications meant to reduce analysis costs are assumed elsewhere.
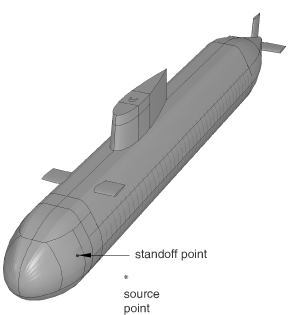
The structure is loaded by an incident wave with a shock profile amplitude.
If structural integrity is analyzed, a reasonable assumption is that most
affected regions will be around the standoff point; thus, more attention to
modeling details should be paid to the front part of the submarine (Figure 1
and
Figure 5).
Problem and geometry description
The model presented was created based on specifications provided by
Forschungsanstalt der Bunderwehr für Wasserschall und Geophysik
(FWG), Kiel, Germany (Fiedler and Schneider,
2002). This model is known as the Benchmark Target Strength Simulation
(BeTSSi) model and is a reasonably
sophisticated replica of a Kilo-class Soviet submarine. The complexity of the
structure is considered suitable for testing target-strength simulation codes
for more realistic problems (Schneider et al., 2003). In this example problem
the BeTSSi model is adapted to test
Abaqus/Explicit
for a realistic underwater explosion (UNDEX)
simulation.
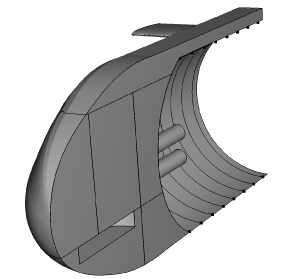
Structural details include flooded bow compartments, sonar array, torpedo
tubes, flooded sail compartments, sail access tubes, and an aft chamber (Figure 1
through
Figure 4).
The pressure hull is enveloped by an external hull only along the upper side
and is in direct contact with the fluid throughout the bottom side. The
intra-hull space is also flooded along the length of the submarine.
The following procedure summarizes the sequence to run the input files:
Run the following beam section property generation procedures to generate the
corresponding jobname.bsp files:
abaqus job=undex_beam_section_front.
abaqus job=undex_beam_section_sail.
abaqus job=undex_beam_section_back1.
abaqus job=undex_beam_section_back2.
abaqus job=undex_beam_section_back3.
abaqus job=undex_beam_section_back4.
abaqus job=undex_beam_section_back5.
abaqus job=undex_beam_section_back6.
abaqus job=undex_beam_section_back7.
abaqus job=undex_beam_section_back8.
abaqus job=undex_beam_section_back9.
abaqus job=undex_beam_section_back10.
abaqus job=undex_beam_section_back11.
abaqus job=undex_beam_section_back12.
abaqus job=undex_beam_section_back13.
Run the following driver input file:
abaqus job=undex_driver_xpl
which uses not only the previously generated
jobname.bsp files in Step 1 but also
the following included files:
undex_parts.inp.
undex_outwater_h01.inp.
undex_innerwater_h01.inp.
undex_tapered_beam_elsets.inp.
undex_tapered_beam_sections.inp.
undex_subbody_h005.inp.
undex_ties.inp.
undex_assembly.inp.
undex_materials_s.inp.
undex_ampl.inp.
undex_acoustics_s.inp.
undex_boundary_conditions.inp.
undex_output_requests.inp.
undex_step.inp.
Reduced model
Since the Kwon & Fox (KF) load signal
carries a large excitation spectrum, the outside water has to extend to a large
distance, corresponding to the lowest end of spectrum, and both the submarine
structure and the outside water have to be discretized with a small element
size, corresponding to the wavelength of the high end of the spectrum. This
generates a considerably large computational model, due also to the significant
difference between the length of the submarine model (62 m) and the low
wavelength of the high end of the spectrum. Consequently, a modeling approach
is employed in this example problem where a “region of interest” is defined
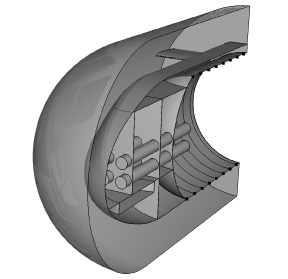
around the shock-wave standoff point. The reduced model still includes details
such as flooded bow compartments, torpedo tubes, a sonar dome, and a portion of
the pressure and exterior hulls, with the fluid domain defined in the
intra-hull space. In addition, stiffeners are added for the detailed region of
the pressure hull. The rest of the submarine model is simplified using beam
elements, coupled with the region of interest using kinematic coupling
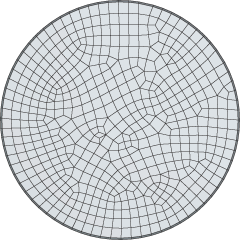
constraints. The section behavior of the beams is defined using meshed
cross-sections to approximate the cross-section inertia of the real structure
(Figure 6,
Figure 7,
and
Figure 8).
The tapered region at the back of the submarine is approximated via 13
stepwise-constant circular cross-sections. Finally, the inertia effects of the
outside water are included.
The exterior acoustic domain (water) envelops only the region of interest
and extends to a distance of approximately 1.5 m from the submarine structure,
corresponding to half the wavelength inwater at a frequency of 500 Hz.
Impedance boundary conditions are applied on truncation surfaces to reduce
spurious reflections.
Results and discussion
Applying the above simplifications and element sizes of
for the structure and
for both the inner and outer water domains, the aggregate model size is 1.2
million nodes and 5.1 million elements, including AC3D4, S4R, S3R, and B31 elements. The analysis is stopped after 6 ms, enough for the
wavefront traveling through the acoustic medium to sweep the region of
interest.
The pressure for the inner and outer acoustic domains is depicted in
Figure 9
at the end of the 6 ms response. Observe the high-frequency content of the
acoustic pressure inside the bulkheads, due to the excitation from the walls.
The high-frequency content of the waves in the bulkheads' walls can be seen in
Figure 13
and
Figure 14.
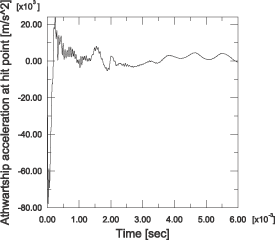
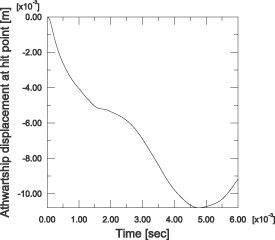
Figure 10,
Figure 11,
and
Figure 12
illustrate the history of acceleration, velocity, and displacement responses at
the standoff point, respectively. A kick-off acceleration of almost 8
km/s2 is reached due to the initial shock, followed by a rapid
decay. By the end of the shock duration (4 ms), it is almost stabilized around
zero. The kick-off velocity reaches a value of almost 8 m/s, while the
athwartship displacement shows a maximum drift of about 10 mm.
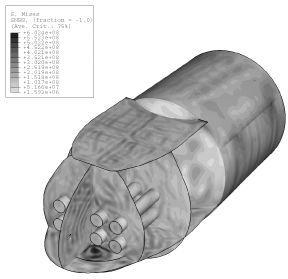
Structural integrity is one of the major concerns of such an analysis. Almost the entire
structure is assumed to be made of perfect elastic-plastic steel plates, with
position-dependent thicknesses. The only exceptions are the stiffeners, defined as beams
with T cross-sections. The material is the same as for the rest of the submarine model, a
perfect elastic-plastic steel. High stress concentration regions are analyzed by plotting
von Mises stresses (Figure 15); permanent deformations are monitored via the equivalent plastic strain (Figure 16). High stress concentration regions as well as permanent deformations are observed for
regions around the joints. The maximum stresses are observed on the upper panels of the
sonar dome, while the largest permanent deformation is obtained around the joint between the
pressure hull, the exterior hull, and the horizontal bow compartment.
Section mesh data for generating cross-section beam properties for the 13th
back region.
References
Fiedler, Ch., and H. G. Schneider, “BeTSSi-Sub—Benchmark
Target Strength Simulation
Submarine,” Technical Report,
Forschungsanstalt der Bundeswehr für Wasserschall und Geophysik,
Kiel, 2002.
Kwon, K.
W., and P.
K. Fox, “Underwater
Shock Response of a Cylinder Subjected to a Side-On
Explosion,” Computers and
Structures, vol. 48, no. 4, 1993.
Schneider, H.G.et
al., “Acoustic
Scattering by a Submarine: Results from a Benchmark Target Strength Simulation
Workshop,” Proceedings of Tenth International
Congress on Sound and Vibration, Stockholm,
Sweden, 2003.
Figures
Figure 1. BeTSSi full submarine model. Figure 2. Cut view through front part of the model including details such as
bulkheads, torpedo tubes, and the sonar dome. Figure 3. Cut view through sail; sail compartments and access tubes are
visible. Figure 4. Flooded bow compartments. Figure 5. Cut view of reduced model, including exterior fluid domain. Figure 6. Meshed cross-section of the front beams. Figure 7. Meshed cross-section of the sail beams. Figure 8. Meshed cross-section of the back beams. Figure 9. Pore pressure contours of the inner and outer water. Figure 10. Athwartship acceleration at the standoff point. Figure 11. Athwartship velocity at the standoff point. Figure 12. Athwartship displacement at the standoff point. Figure 13. Cut view of deformed configuration. Figure 14. Deformed configuration of pressure hull, bulkheads, torpedo tubes, and
sonar dome: whole view. Figure 15. Von Mises stress for bow compartments, pressure hull, torpedo tubes, and sonar
array. Figure 16. Equivalent plastic strain for bow compartments, pressure hull, torpedo
tubes, and sonar array.