You can simulate fluid pressure penetration loads as distributed surface loads or
pairwise surface loads.
Fluid pressure penetration loads simulated as distributed surface loads:
model the penetration of fluid on a surface as distributed surface pressure penetration
loads that considers the contact pressure field arising from general contact; and
allow the fluid to penetrate from multiple locations on the surface.
Fluid pressure penetration loads simulated as pairwise surface loads:
model the penetration of fluid as pairwise pressure penetration loads between specified
interfaces with contact pairs; and
allow the fluid to penetrate from multiple locations on the surface.
Simulating Effects of Fluid Pressure Acting on Surfaces that Consider Contact
Conditions
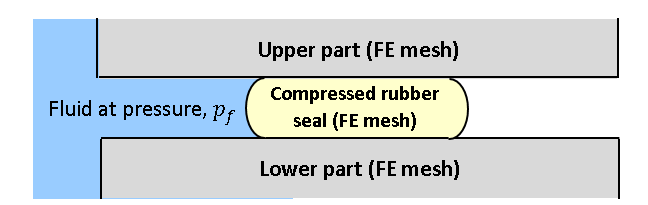
You can model the effects of fluid pressure acting on surfaces without directly modeling
the fluid volume. The extent of a surface exposed to fluid pressure can evolve as contact
conditions change. Consider the example shown in Figure 1 and Figure 2. A
key purpose of the simulation might be to determine if the seal is able to contain the
pressurized fluid.
In this type of simulation, one or more initial steps are conducted without the effects of
a fluid pressure load to compress the seal. Fluid pressure loading is introduced in a
subsequent step. At the beginning of this step, a surface pressure load of magnitude acts on surface regions exposed to the fluid on the left side of Figure 1, where the contact pressure is below a specified threshold value, . The surface pressure load might cause the contact pressure to drop below over a greater area, leading to more of the surface being exposed to the
fluid as shown in Figure 2. Various design factors influence whether fluid penetration continues
until failure of the seal in these types of studies.
Figure 1. Initial configuration for a fluid pressure loading example. Figure 2. Configuration after some "penetration" of fluid pressure into interfaces.
Abaqus provides two methods for fluid pressure penetration loading that evolves based on contact
conditions:
Distributed surface pressure penetration loading used in conjunction with general
contact and available in both Abaqus/Standard and Abaqus/Explicit.
Surface pairwise pressure penetration loading used in conjunction with contact pairs
and available only in Abaqus/Standard.
These two methods overlap in functionality and control. Similarities include the ability to
control the region initially exposed to the fluid pressure, the magnitude of the fluid
pressure, and the critical contact pressure below which fluid penetration starts to
occur.
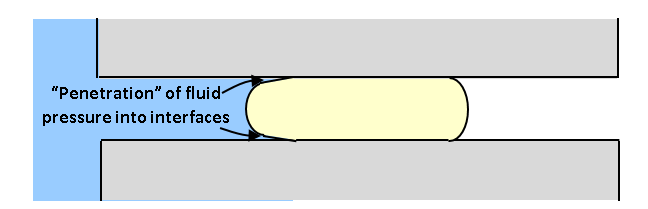
Results for axisymmetric O-ring seal simulations are shown in Figure 3 and Figure 4. The O-ring is compressed into a cavity between analytical rigid surfaces
prior to the introduction of fluid pressure penetration loading. The axisymmetric model of
the seal is swept circumferentially to facilitate visualization of results Figure 3 and Figure 4, although the two analytical surfaces are not swept. These simulations
consider effects of fluid entering the top, left corner of the cavity to determine if the
seal design successfully contains the fluid. Figure 3 shows contour plots of fluid pressure loading
(PPRESS) in the top left corner of the
cavity very early in the process of applying fluid pressure penetration loading for three
simulation variants modeling the same physics:
An Abaqus/Standard simulation with the distributed surface pressure penetration loading capability in
conjunction with general contact.
An Abaqus/Explicit simulation with the distributed surface pressure penetration loading capability in
conjunction with general contact.
An Abaqus/Standard simulation with the surface pairwise pressure penetration loading capability in
conjunction with contact pairs.
For this example, the two Abaqus/Standard simulations use the implicit dynamics procedure, and the Abaqus/Explicit simulation uses the explicit dynamics procedure. Contour plots of
PPRESS in Figure 4 show the final extent of the region exposed to fluid pressure for these
simulations. All three simulations predict similar distances of fluid penetration into the
contact interface.Figure 3. Fluid pressure penetration load magnitude (PPRESS) contour plots showing the region
initially exposed to fluid pressure for three variants of a simulation. Figure 4. Fluid pressure penetration load magnitude (PPRESS) contour plots showing the final
extent of the region exposed to fluid pressure for three variants of a simulation.
Input File Usage
A potential keyword interface for distributed surface pressure penetration loading in
conjunction with general contact for the example shown in Figure 1 and Figure 2
is:
**Contact specification
CONTACTCONTACT INCLUSIONS, ALL EXTERIOR
…
**Fluid pressure penetration load specification
DSLOAD
seal_leftside, PPEN, 1.E5, 1.E4, LOCAL
upperpart_leftside, PPEN, 1.E5, 1.E4, LOCAL
lowerpart_leftside, PPEN, 1.E5, 1.E4, LOCAL
A potential keyword interface for pairwise pressure penetration loading associated
with contact pairs (contact) for the same example is:
You specify the surface potentially exposed to fluid pressure loading, the magnitude of the
fluid pressure, the critical contact pressure below which fluid penetration starts to occur,
the name of the algorithm associated with evolution of the region exposed to fluid pressure,
the nodes initially exposed to the fluid, and the penetration time. All surface faces
potentially exposed to fluid pressure loading with this capability must be included in the
general contact domain (see Defining the General Contact Domain in Abaqus/Standard and Defining the General Contact Domain in Abaqus/Explicit.
Input File Usage
DSLOAD, AMPLITUDE=name, OP=MOD (default) or NEWsurface, PPEN, fluid pressure magnitude, critical contact pressure, LOCAL or WETTING ADVANCE,
node or node set, penetration time
Magnitude and Time Dependence of the Fluid Pressure
You define the reference magnitude of the fluid pressure and can optionally define the
variation of the fluid pressure during a step by referring to an amplitude curve.
Surface-based fluid pressure penetration loading is defined in a similar method to other
types of distributed surface loads, including for a surface pressure acting over a
nonvarying region of a surface (see Distributed Loads). For
information about specifying the reference magnitude of the fluid pressure, refer to Specifying Pressure Loads. For information about specifying the time dependence of the fluid pressure, refer to
Defining Time-Dependent Distributed Loads and About Prescribed Conditions. At each new step, you can modify or
completely redefine the fluid pressure penetration loading similar to the way that
distributed loads are defined (see About Loads).
Initialization and Evolution of the Region Exposed to Fluid
Pressure
Abaqus provides two algorithms, named LOCAL and WETTING ADVANCE, associated with
initialization and evolution of the region exposed to fluid pressure. These algorithms are
described as follows:
LOCAL algorithm
A surface face is “wetted” (exposed to fluid pressure) while a measure of the
local contact pressure associated with the face, , is less than or equal to a critical contact pressure, . A newly wetted surface face need not be adjacent to an
already wetted surface face with this algorithm.
A surface face is “unwetted” (not exposed to fluid pressure) while the measure
of the local contact pressure associated with the face, is greater than a critical contact pressure, .
These criteria are applicable when the fluid pressure penetration load is
first introduced and thereafter. You do not specify a node or node set initially
exposed to fluid pressure in this case.
There are no limits to the number of changes in wetting status for a face with
this algorithm. For example, a surface face might be initially unwetted, then
become wetted, and still later become unwetted again.
This algorithm is available in Abaqus/Standard and Abaqus/Explicit.
WETTING ADVANCE algorithm
Wetting is irreversible with this algorithm. Once a surface face becomes
wetted, it remains wetted as long as pressure penetration loading is in
effect.
You must specify either a single node or a node set consisting of nodes that
are initially exposed to fluid pressure. These nodes are not required to be
adjacent. If all nodes of a surface face are included in this node set, the face
is initially wetted.
Abaqus determines an initial wetted front, consisting of all nodes in the
user-specified node or node set, except those nodes whose adjacent faces are all
initially wetted. Abaqus updates the set of wetted-front nodes in subsequent increments as additional
faces become wetted.
An initially unwetted face becomes wetted when any of its adjacent nodes are
along the wetted front and a measure of the local contact pressure associated
with the face, , is less than or equal to a critical contact pressure, . The wetted front can advance by one face per increment in Abaqus/Explicit with this algorithm.
This algorithm is available only in Abaqus/Explicit.
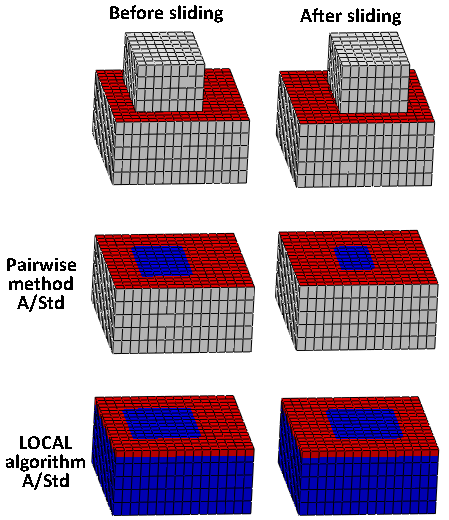
Figure 5 shows results for two Abaqus/Explicit simulations with fluid pressure penetration loading for a simple example consisting of
a small block sliding along a larger block. The color red indicates fluid pressure
exposure, while the color blue indicates no exposure to the fluid pressure. The top block
is omitted from some plots in Figure 5 to observe fluid pressure exposure on
the top surface of the bottom block. All sides except the top of the smaller, top block
and the top side of the larger, bottom block are potentially exposed to fluid pressure in
this example. The four vertical sides of the top block are exposed to fluid pressure
throughout the simulation for both types of wetting algorithms. Differences between the
LOCAL and WETTING ADVANCE algorithms are especially apparent on the top side of the bottom
block. With the WETTING ADVANCE algorithm, once a face becomes wetted it remains wetted
regardless of subsequent contact conditions. However, with the LOCAL algorithm, the wetted
region corresponds to the region currently without significant contact pressure.
Figure 5. Two-block sliding example with surface-based fluid pressure penetration loading in
Abaqus/Explicit.
A critical contact pressure, , applies to both algorithms. is zero by default, but it might be appropriate to specify a positive
critical contact pressure to account for a tendency for fluid pressure to creep into an
interface under low contact pressure due to surface roughness effects. Increasing the
value of tends to increase surface area exposed to fluid pressure.
The treatment of any overlapping fluid pressure penetration loadings depends on the types
of wetting algorithms involved:
Overlapping fluid pressure penetration loadings involving a mixture of the LOCAL and
WETTING ADVANCE algorithms: This is not allowed and triggers an error message.
Overlapping fluid pressure penetration loadings involving the LOCAL algorithm: If a
face satisfies the wetting criteria for multiple loadings, the greatest fluid pressure
among those loadings is applied, with consideration of current values for time varying
fluid pressures.
Overlapping fluid pressure penetration loadings involving the WETTING ADVANCE
algorithm: Abaqus monitors nodal “fronts” with adjacent faces exposed to different fluid pressure
penetration loadings. These fronts can change by one face per increment in Abaqus/Explicit, such that the surface region exposed to the greatest fluid pressure expands.
Specifying a Penetration Time for the Fluid Pressure in Abaqus/Standard
When the fluid pressure penetration criterion is satisfied, the fluid pressure is applied
normal to the surfaces. If the full current fluid pressure is applied immediately, the
resulting large changes in the strains near the contact surfaces can cause convergence
difficulties. For large-strain problems severe mesh distortion can also occur. To ensure a
smooth solution, the fluid pressure is ramped up linearly over a time period from zero
pressure penetration load to the full current magnitude.
You can specify the time period taken for the fluid pressure penetration load to reach
the full current magnitude on newly penetrated surface segments. If the accumulated
increment size, measured immediately after the penetration, is greater than the
penetration time, the full current fluid pressure penetration load is applied; otherwise,
the fluid pressure on the newly penetrated surface segments is ramped up linearly to the
current magnitude over the penetration time period, possibly over a number of increments.
When the penetration time is equal to 0, the current fluid pressure is applied immediately
once the fluid pressure penetration criterion is satisfied. The default penetration time
is chosen to be 0.001 of the total step time. The penetration time is ignored in a linear
perturbation step.
Limitations with Surface-based Fluid Pressure Penetration Loads
Fluid pressure penetration loading must be used with a single-sided element-based
surface.
It is often good practice, but not required, to define fluid pressure penetration loading
on both surfaces of an interface. The loads are applied independently of each other
because the loading is surface-based and not pairwise, and the wetted front locations are
also determined independently. Thus, the fluid pressure loading can be influenced by how
well the mesh densities are matched between the two surfaces along the interface because
the wetted front regions along each surface might not match exactly.
While pressure penetration loading acts on a single-sided surface of a shell, the contact
pressure field used to compare with the critical contact pressure does not distinguish
between contact on either side of the shell. As such, fluid evolution might be inhibited
due to contact on the shell side in which the fluid pressure penetration load is not
potentially applied.
The fluid pressure penetration load applied at any increment is based on the contact
status at the beginning of that increment. Therefore, in Abaqus/Standard, you should be careful in interpreting the results at the end of an increment during
which the contact status has changed. Small time increments are recommended to obtain
accurate results. This behavior should have minimal effect with Abaqus/Explicit.
In large-displacement Abaqus/Standard analyses, pressure penetration loads introduce unsymmetric load stiffness matrix terms.
Using the unsymmetric matrix storage and solution scheme for the analysis step might
improve the convergence rate of the equilibrium iterations. For more information on the
unsymmetric matrix storage and solution scheme, see Defining an Analysis.
The contact pressure field from contact pairs does not have any
influence on the evolution of the fluid.
Fluid pressure penetration loading is not available within the following Abaqus/Standard procedures: frequency, complex frequency, buckling, RIKS, substructure generation, and
beam section generation. For general procedure types, this loading is not available for
steady state transport. However, fluid pressure penetration loads from prior steps can be
propagated from the base state of these steps if the steps are linear or remain fixed in
the case of a steady state transport step. Fluid pressure penetration loads are not
available when you specify a cyclic symmetry mode number because this type of loading does
not guarantee cyclic symmetry.
Only solid, shell, axisymmetric, cylindrical, and rigid elements
are supported for fluid pressure penetration.
Pairwise Fluid Pressure Penetration Loading with Contact
Pairs in Abaqus/Standard
A pairwise fluid pressure penetration loading specification must refer to surfaces of a
contact pair. These surface might both be deformable, as is the case with threaded
connectors; or one body might be rigid, as occurs when a soft gasket is used as a seal
between stiffer structures. Any contact formulation can be used. Other aspects influencing
pairwise fluid pressure penetration loading are discussed in Magnitude and Time Dependence of the Fluid Pressure and Initialization and Evolution of the Region Exposed to Fluid Pressure.
You specify the main and secondary surfaces of the contact pair,
nodes exposed to the fluid pressure, the magnitude of the fluid pressure, the critical
contact pressure below which fluid penetration starts to occur, and the penetration time.
Input File Usage
PRESSURE PENETRATION, SECONDARY=secondary1, MAIN=main1, PENETRATION TIME
secondary surface node or node set, main surface node or node set, magnitude, critical contact pressure
If a node set is specified, it can contain only
one node in two dimensions; in three dimensions it can contain any number of nodes.
Magnitude and Time Dependence of the Fluid Pressure
You must define the reference magnitude of the fluid pressure. You can define the
variation of the fluid pressure during a step by referring to an amplitude curve. By
default, the reference magnitude is applied immediately at the beginning of the step or
ramped up linearly over the step, depending on the amplitude variation assigned to the
step (see Defining an Analysis).
The pairwise fluid pressure penetration load is applied to the element surface based on
the pressure penetration criterion at the beginning of an increment and remains constant
over that increment even if the fluid penetrates further during that increment. A nodal
integration scheme is used to integrate the distributed fluid pressure penetration load
over an element in two dimensions, while in three dimensions Gauss integration scheme is
used; the variation of the distributed fluid pressure over an element is determined by the
load magnitudes at the element's nodes.
Input File Usage
Use the following option to define the variation of the fluid pressure during a
step:
Removing or Modifying the Pressure Penetration Loads
After pairwise fluid pressure penetration loads are applied to the element surfaces,
they are not removed automatically even when contact between the surfaces is
re-established. At each new step the fluid pressure penetration loading, however, can be
modified or completely redefined in a manner similar to the way that distributed loads
can be defined (see About Loads).
Input File Usage
Use the following option to modify the fluid pressure penetration loads that were
applied in previous steps:
In this case the secondary nodes exposed to the fluid pressure must be specified
on the data lines. If the main surface is not an analytical rigid surface, the main
nodes exposed to the fluid pressure must also be specified on the data lines for
planar or axisymmetric models.
Use the following option to remove all fluid pressure penetration loads and,
optionally, to specify new fluid pressure penetration loads:
When
OP=NEW
is used to remove all fluid pressure penetration loads, no data line is needed.
However, when
OP=NEW
is used to specify new fluid pressure penetration loads, the nodes exposed to the
fluid pressure must be specified on the data lines.
OP=NEW
must be used when defining new exposed nodes. In addition, when
OP=NEW
is used to respecify a previously defined pressure penetration load, the fluid
pressure loading reverts to its last known configuration first, even if the contact
status has subsequently changed.
Initialization and Evolution of the Region Exposed to Fluid Pressure
The algorithm associated with initialization and evolution of the region exposed to the
fluid pressure for pairwise fluid pressure penetration loading with contact pairs in Abaqus/Standard is similar to the WETTING ADVANCE algorithm of surface fluid pressure penetration
loading with general contact in that the wetting is irreversible and the wetting region
incrementally grows along a wetted front.
The fluid can penetrate from either one or multiple locations of the surface. You must
identify a node or node set on the secondary surface of the contacting bodies that defines
where the surface is exposed to the fluid pressure. In two dimensions if the main surface
is not an analytical rigid surface (see Analytical Rigid Surface Definition), you must
also identify a node or node set on the main surface that defines where the surface is
exposed to fluid pressure. These nodes or node sets are always subjected to the pairwise
fluid pressure penetration load if they are on the secondary surface, regardless of their
contact status. The wetted surface region expands as fluid effectively penetrates into the
interface of the contacting bodies from these nodes or nodes sets until a point is reached
where the contact pressure is greater than the specified critical value, , cutting off further penetration of the fluid.
is zero by default, but it might be appropriate to specify a positive
critical contact pressure to account for a tendency for fluid pressure to creep into an
interface under low contact pressure due to surface roughness effects. Increasing the
value of tends to increase surface areas exposed to fluid pressure.
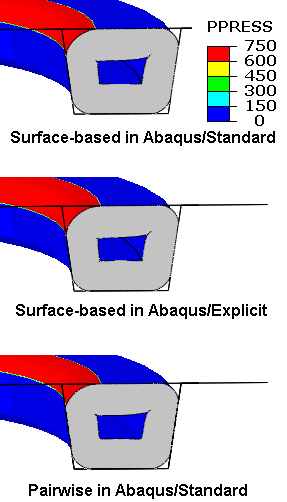
Figure 6 shows results for two Abaqus/Standard simulations with fluid pressure penetration loading for a small block sliding along a
larger block. Figure 5 shows Abaqus/Explicit results for the same example with the LOCAL and WETTING ADVANCE algorithms using
general contact. The color red indicates fluid pressure exposure, while the color blue
indicates no exposure to the fluid pressure. With pairwise pressure penetration loading,
output indicating fluid pressure exposure is available only on the secondary surface. All
sides except the top of the smaller, top block and just the top side of the larger, bottom
block are potentially exposed to fluid pressure. The four vertical sides of the top block
are exposed to fluid pressure throughout the simulation for both pairwise fluid pressure
penetration loading and surface-based fluid pressure penetration loading.
Results on the top surface of the bottom block:
are similar for the pairwise method in Abaqus/Standard (see middle row of plots in Figure 6) and the surface-based method with the WETTING ADVANCE
algorithm in Abaqus/Explicit (see bottom row of plots in Figure 5); although, for example, the region
under fluid pressure extends into the active contact region due to the ramp-down
characteristic described in Fluid Pressure Ramp Versus Sharp Cutoff at the Wetted Front;
and
are similar for the LOCAL algorithm in Abaqus/Standard (see bottom row of plots in Figure 6) and Abaqus/Explicit (see middle row of plots in Figure 5).
Figure 6. Two-block sliding example comparing pairwise fluid pressure penetration loading and
surface-based fluid pressure penetration loading in Abaqus/Standard.
Fluid Pressure Ramp Versus Sharp Cutoff at the Wetted Front
In three dimensions the surfaces of the elements at the front of the penetrated nodes can
have only ramped-down pressure loadings. In two dimensions the surfaces of the elements at
the front of the penetrated nodes can have either zero or ramped-down pressure loadings.
Input File Usage
Use the following option to apply zero pressure loading to the unwetted surface at
the front of the penetration node:
Specifying a Penetration Time for the Fluid Pressure
When the pairwise fluid pressure penetration criterion is satisfied, the fluid pressure
is applied normal to the surfaces. If the full current fluid pressure is applied
immediately, the resulting large changes in the strains near the contact surfaces can
cause convergence difficulties. For large-strain problems severe mesh distortion can also
occur. To ensure a smooth solution, the fluid pressure is ramped up linearly over a time
period from zero pressure penetration load to the full current magnitude.
You can specify the time period taken for the pairwise fluid pressure penetration load to
reach the full current magnitude on newly penetrated surface segments. If the accumulated
increment size, measured immediately after the penetration, is greater than the
penetration time, the full current fluid pressure penetration load is applied; otherwise,
the fluid pressure on the newly penetrated surface segments is ramped up linearly to the
current magnitude over the penetration time period, possibly over a number of increments.
When the penetration time is equal to 0, the current fluid pressure is applied immediately
once the fluid pressure penetration criterion is satisfied. The default penetration time
is chosen to be 0.001 of the total step time. The penetration time is ignored in a linear
perturbation step.
Limitations with Pairwise Fluid Pressure Penetration Loads
Each secondary surface subjected to pressure penetration loading must be continuous and
cannot be a closed loop. Pressure penetration loading cannot be used with a node-based
secondary surface. The pressure penetration load applied at any increment is based on the
contact status at the beginning of that increment. You should, therefore, be careful in
interpreting the results at the end of an increment during which the contact status has
changed. Small time increments are recommended to obtain accurate results.
When pressure penetrates into contacting bodies between an analytical rigid surface and a
deformable surface, no pressure penetration load are applied to the analytical rigid
surface. The reference node on the analytical rigid surface should, therefore, be
constrained in all directions. To account for the effect of fluid pressure penetration
loads on the rigid surface, the analytical rigid surface should be replaced with an
element-based rigid surface.
When fluid with different pressure loads penetrates into an element simultaneously from
multiple locations on a surface, the maximum value of the fluid pressure loads is applied
to the element.
In large-displacement analyses pressure penetration loads introduce unsymmetric load
stiffness matrix terms. Using the unsymmetric matrix storage and solution scheme for the
analysis step might improve the convergence rate of the equilibrium iterations. See Defining an Analysis for more
information on the unsymmetric matrix storage and solution scheme.
Only solid, shell, cylindrical, and rigid elements are supported for three-dimensional
pressure penetration.
Behavior in Linear Perturbation Steps
Perturbation analyses can be performed during a fully nonlinear analysis by including
linear perturbation steps between the general analysis steps. With the exception of the
static LCP perturbation procedure, contact conditions are
not allowed to change during a linear perturbation step; the fluid penetrates no further
into the surface and remains as it was defined in the base state. Even in the case of a
static LCP perturbation procedure, where the contact status
at the end of the perturbation analysis can be different from the base state, the portions
of the contact surfaces where the fluid pressure acts remain frozen at the base state. The
fluid pressure magnitude applied in the previous general analysis step, however, can be
modified during a linear perturbation analysis step. In matrix generation (see Generating Structural Matrices) and
steady-state dynamic analyses (direct or modal—see Direct-Solution Steady-State Dynamic Analysis and Mode-Based Steady-State Dynamic Analysis) you can specify
both the real (in-phase) and imaginary (out-of-phase) parts of the loading.
Input File Usage
Use the following option to define the real (in-phase) part of the surface based fluid
pressure penetration loading:
The REAL or
IMAGINARY parameters are ignored in all
procedures other than steady-state dynamics.
Output
You can request the fluid pressure load,
PPRESS, on nodes as surface output to the
data, results, and output database files (see Surface Output from Abaqus/Standard, and Writing Surface Output to the Output Database). With pairwise fluid pressure loading, this output can be
defined on nodes along the secondary surface.