can include nondiagonal damping effects (i.e., from material or
element damping) only when using the SIM
architecture;
is an alternative to direct-solution steady-state dynamic analysis, in
which the system's response is calculated in terms of the physical degrees of
freedom of the model;
can include computation of acoustic contribution factors to help
determine the major contributors to acoustic noise;
is computationally cheaper than direct-solution or subspace-based
steady-state dynamics;
is less accurate than direct-solution or subspace-based steady-state
analysis, in particular if significant material damping is present, and
is able to bias the excitation frequencies toward the values that
generate a response peak.
Steady-state dynamic analysis provides the steady-state amplitude and phase
of the response of a system due to harmonic excitation at a given frequency.
Usually such analysis is done as a frequency sweep by applying the loading at a
series of different frequencies and recording the response; in
Abaqus/Standard
the steady-state dynamic analysis procedure is used to conduct the frequency
sweep.
In a mode-based steady-state dynamic analysis the response is based on modal
superposition techniques; the modes of the system must first be extracted using
the eigenfrequency extraction procedure. The modes will include eigenmodes and,
if activated in the eigenfrequency extraction step, residual modes. The number
of modes extracted must be sufficient to model the dynamic response of the
system adequately, which is a matter of judgment on your part.
When defining a mode-based steady-state dynamic step, you specify the
frequency ranges of interest and the number of frequencies at which results are
required in each range (including the bounding frequencies of the range). In
addition, you can specify the type of frequency spacing (linear or logarithmic)
to be used, as described below (Selecting the Frequency Spacing).
Logarithmic frequency spacing is the default. Frequencies are given in
cycles/time.
These frequency points for which results are required can be spaced equally
along the frequency axis (on a linear or a logarithmic scale), or they can be
biased toward the ends of the user-defined frequency range by introducing a
bias parameter (see
The Bias Parameter
below).
While the response in this procedure is for linear vibrations, the prior
response can be nonlinear. Initial stress effects (stress stiffening) will be
included in the steady-state dynamics response if nonlinear geometric effects
(General and Perturbation Procedures)
were included in any general analysis step prior to the eigenfrequency
extraction step preceding the steady-state dynamic procedure.
The DIRECT and SUBSPACE PROJECTION parameters must be omitted from the
STEADY STATE DYNAMICS option to conduct a mode-based steady-state dynamic
analysis.
Selecting the Type of Frequency Interval for Which Output Is Requested
Three types of frequency intervals are permitted for output from a
mode-based steady-state dynamic step.
Specifying the Frequency Ranges by Using the System's Eigenfrequencies
By default, the eigenfrequency type of frequency interval is used; in this
case the following intervals exist in each frequency range:
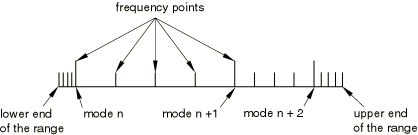
First interval: extends from the lower limit of the frequency range
given to the first eigenfrequency in the range.
Intermediate intervals: extend from eigenfrequency to eigenfrequency.
Last interval: extends from the highest eigenfrequency in the range to
the upper limit of the frequency range.
For each of these intervals the frequencies at which results are
calculated are determined using the user-defined number of points (which
includes the bounding frequencies for the interval) and the optional bias
function (which is discussed below and allows the sampling points on the
frequency scale to be spaced closer together at eigenfrequencies in the
frequency range). Thus, detailed definition of the response close to resonance
frequencies is allowed.
Figure 1
illustrates the division of the frequency range for 5 calculation points and a
bias parameter equal to 1.
Figure 1. Division of range for the eigenfrequency type of interval and 5
calculation points.
Specifying the Frequency Ranges by the Frequency Spread
If the spread type of frequency interval is selected, intervals exist
around each eigenfrequency in the frequency range. For each of the intervals
the equally spaced frequencies at which results are calculated are determined
using the user-defined number of points (which includes the bounding
frequencies for the interval). The minimum number of frequency points is 3. If
the user-defined value is less than 3 (or omitted), the default value of 3
points is assumed.
Figure 2
illustrates the division of the frequency range for 5 calculation points.
The bias parameter is not supported with the spread type of frequency
interval.
Figure 2. Division of range for the spread type of interval and 5 calculation
points.
and
are eigenfrequencies of the system.
Input File Usage
STEADY STATE DYNAMICS, INTERVAL=SPREADlwr_freq, upr_freq, numpts, bias_param, freq_scale_factor, spread
Specifying the Frequency Ranges Directly
If the alternative range type of frequency interval is chosen, there is
only one interval in the specified frequency range spanning from the lower to
the upper limit of the range. This interval is divided using the user-defined
number of points and the optional bias function, which can be used to space the
sampling frequency points closer to the range limits. For the range type of
frequency interval, the peak responses around the system's eigenfrequencies may
be missed since the sampling frequencies at which output will be reported will
not be biased toward the eigenfrequencies.
Two types of frequency spacing are permitted for a mode-based steady-state
dynamic step. For the logarithmic frequency spacing (the default), the
specified frequency ranges of interest are divided using a logarithmic scale.
Alternatively, a linear frequency spacing can be used if a linear scale is
desired.
The bias parameter can be used to provide closer spacing of the results
points either toward the middle or toward the ends of each frequency interval.
Figure 3
shows a few examples of the effect of the bias parameter on the frequency
spacing.
Figure 3. Effect of the bias parameter on the frequency spacing for a number of
points .
The bias formula used to calculate the frequency at which results are
presented is as follows:
where
y
;
n
is the number of frequency points at which results are to be given within a
frequency interval (discussed above);
k
is one such frequency point ();
is the lower limit of the frequency interval;
is the upper limit of the frequency interval;
is the frequency at which the kth results are given;
p
is the bias parameter value; and
is the frequency or the logarithm of the frequency, depending on the value
used for the frequency scale parameter.
A bias parameter, p, that is greater than 1.0 provides
closer spacing of the results points toward the ends of the frequency interval,
while values of p that are less than 1.0 provide closer
spacing toward the middle of the frequency interval. The default bias parameter
is 3.0 for an eigenfrequency interval and 1.0 for a range frequency interval.
The Frequency Scale Factor
The frequency scale factor can be used to scale frequency points. All the
frequency points, except the lower and upper limit of the frequency range, are
multiplied by this factor. This scale factor can be used only when the
frequency interval is specified by using the system's eigenfrequencies (see
Specifying the Frequency Ranges by Using the System's Eigenfrequencies
above).
Selecting the Modes and Specifying Damping
You can select the modes to be used in modal superposition and specify
damping values for all selected modes.
Selecting the Modes
You can select modes by specifying the mode numbers individually, by
requesting that
Abaqus/Standard
generate the mode numbers automatically, or by requesting the modes that belong
to specified frequency ranges. If you do not select the modes, all modes
extracted in the prior eigenfrequency extraction step, including residual modes
if they were activated, are used in the modal superposition.
Input File Usage
Use one of the following options to select the modes by
specifying mode numbers:
Damping is almost always specified for a steady-state analysis (see
Material Damping).
If damping is absent, the response of a structure will be unbounded if the
forcing frequency is equal to an eigenfrequency of the structure. To get
quantitatively accurate results, especially near natural frequencies, accurate
specification of damping properties is essential. The various damping options
available are discussed in
Material Damping.
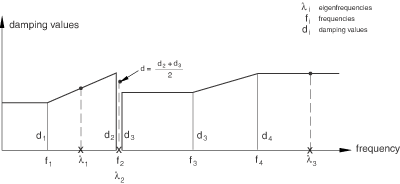
You can define a damping coefficient for all or some of the modes used in the
response calculation. The damping coefficient can be given for a specified mode
number or for a specified frequency range. When damping is defined by
specifying a frequency range, the damping coefficient for a mode is
interpolated linearly between the specified frequencies. The frequency range
can be discontinuous; the average damping value will be applied for an
eigenfrequency at a discontinuity. The damping coefficients are assumed to be
constant outside the range of specified frequencies.
Input File Usage
Use the following option to define damping by specifying mode
numbers:
Figure 4. Damping values specified by frequency range.
Rules for Selecting Modes and Specifying Damping Coefficients
The following rules apply for selecting modes and specifying modal damping
coefficients:
No modal damping is included by default.
Mode selection and modal damping must be specified in the same way,
using either mode numbers or a frequency range.
If you do not select any modes, all modes extracted in the prior
frequency analysis, including residual modes if they were activated, will be
used in the superposition.
If you do not specify damping coefficients for modes that you have
selected, zero damping values will be used for these modes.
Damping is applied only to the modes that are selected.
Damping coefficients for selected modes that are beyond the specified
frequency range are constant and equal to the damping coefficient specified for
the first or the last frequency (depending which one is closer). This is
consistent with the way
Abaqus
interprets amplitude definitions.
Specifying Global Damping
For convenience you can specify constant global damping factors for all
selected eigenmodes for mass and stiffness proportional viscous factors, as
well as stiffness proportional structural damping. For further details, see
Damping in Dynamic Analysis.
Input File Usage
Use the following option to define damping by global factors:
GLOBAL DAMPING, ALPHA=factor, BETA=factor, STRUCTURAL=factor
Material Damping
Structural and viscous material damping (see
Material Damping)
is taken into account in a SIM-based
steady-state dynamic analysis. Since the projection of damping onto the mode
shapes is performed only one time during the frequency extraction step,
significant performance advantages can be achieved by using the
SIM-based steady-state dynamic procedure (see
Using the SIM Architecture for Modal Superposition Dynamic Analyses).
If the damping operators depend on frequency, they will be evaluated at the
frequency specified for property evaluation during the frequency extraction
procedure.
You can deactivate the structural or viscous damping in a mode-based
steady-state dynamic procedure if desired.
Input File Usage
Use the following option to deactivate structural and viscous
damping in a specific steady-state dynamic step:
The base state is the current state of the model at the end of the last
general analysis step prior to the steady-state dynamic step. If the first step
of an analysis is a perturbation step, the base state is determined from the
initial conditions (Initial Conditions).
Initial condition definitions that directly define solution variables, such as
velocity, cannot be used in a steady-state dynamic analysis.
Boundary Conditions
In a mode-based steady-state dynamic analysis both the real and imaginary
parts of any degree of freedom are either restrained or unrestrained; it is
physically impossible to have one part restrained and the other part
unrestrained.
Abaqus/Standard
will automatically restrain both the real and imaginary parts of a degree of
freedom even if only one part is restrained.
Base Motion
It is not possible to prescribe nonzero displacements and rotations directly
as boundary conditions (Boundary Conditions)
in mode-based dynamic response procedures. Therefore, in a mode-based
steady-state dynamic analysis, the motion of nodes can be specified only as
base motion; nonzero displacement or acceleration history definitions given as
boundary conditions are ignored, and any changes in the support conditions from
the eigenfrequency extraction step are flagged as errors. The method for
prescribing base motion in modal superposition procedures is described in
Transient Modal Dynamic Analysis.
Base motions can be defined by a displacement, a velocity, or an
acceleration history. For an acoustic pressure the displacement is used to
describe an acoustic pressure history. If the prescribed excitation record is
given in the form of a displacement or velocity history,
Abaqus/Standard
differentiates it to obtain the acceleration history. The default is to give an
acceleration history for mechanical degrees of freedom and to give a
displacement for an acoustic pressure.
When secondary bases are used, low frequency eigenmodes will be extracted
for each “big” mass applied in the model. Use care when choosing the frequency
lower limit range in such cases. The “big” mass modes are important in the
modal superposition; however, the response at zero or arbitrarily low frequency
level should not be requested since it forces
Abaqus/Standard
to calculate responses at frequencies between these “big” mass
eigenfrequencies, which is not desirable.
Frequency-Dependent Base Motion
An amplitude definition can be used to specify the amplitude of a base
motion as a function of frequency (Amplitude Curves).
The following loads can be prescribed in a mode-based steady-state dynamic
analysis, as described in
Concentrated Loads:
Concentrated nodal forces can be applied to the displacement degrees of
freedom (1–6).
Distributed pressure forces or body forces can be applied; the
distributed load types available with particular elements are described in
Abaqus Elements Guide.
These loads are assumed to vary sinusoidally with time over a user-specified
range of frequencies. Loads are given in terms of their real and imaginary
components.
Fluid flux loading cannot be used in a steady-state dynamic analysis.
Input File Usage
Use either of the following input lines to define the real
(in-phase) part of the load:
Predefined temperature fields are not allowed in mode-based steady-state
dynamic analysis. Other predefined fields are ignored.
Material Options
As in any dynamic analysis procedure, mass or density (Density)
must be assigned to some regions of any separate parts of the model where
dynamic response is required. The following material properties are not active
during mode-based steady-state dynamic analyses: plasticity and other inelastic
effects, viscoelastic effects, thermal properties, mass diffusion properties,
electrical properties (except for the electrical potential,
,
in piezoelectric analysis), and pore fluid flow properties—see
General and Perturbation Procedures.
Elements
Any of the following elements available in
Abaqus/Standard
can be used in a steady-state dynamics procedure:
stress/displacement elements (other than generalized axisymmetric
elements with twist);
In mode-based steady-state dynamic analysis the value of an output variable
such as strain (E) or stress (S) is a complex number with real and imaginary
components. In the case of data file output the first printed line gives the
real components while the second lists the imaginary components. Results and
data file output variables are also provided to obtain the magnitude and phase
of many variables (see
Abaqus/Standard Output Variable Identifiers).
In this case the first printed line in the data file gives the magnitude while
the second gives the phase angle.
The energy variables that can be written to the output database are defined
in
Total Energy Output Quantities.
In modal steady-state dynamics analysis the following energy output variables
are available: ALLWK, ALLKE, ALLKEA, ALLKEP, ALLSE, ALLSEA, ALLSEP, ALLVD, ALLVDE, ALLVDG, ALLVDM, ALLHD, ALLHDE, ALLHDG, ALLHDM, EFLOW, PFLOW, RADEN, and RADPOW.
The following energies are not available as element set quantities: ALLWK, ALLVDM, and ALLHDM.
Energy dissipation due to viscous and structural damping is represented by
the following output variables: ALLVD, ALLVDE, ALLVDG, ALLVDM, ALLHD, ALLHDE, ALLHDG, and ALLHDM. In addition, you can examine energy loss due to material,
global, and modal damping as represented by the following output variables: ALLVDE and ALLHDE for material damping, ALLVDG and ALLHDG for global damping, and ALLVDM and ALLHDM for modal damping.
Modal steady-state dynamic analysis supports the computation of the energy
and power flow from/into a portion of the model (represented by an element set)
through a boundary (represented by a node set). Energy flow is represented by
output variable EFLOW, while power flow is given by output variable PFLOW.
Input File Usage
ENERGY OUTPUT, ELSET=elset_name, NSET=nset_nameEFLOW, PFLOW
Radiated Energy and Power
Modal steady-state dynamic analysis supports the computation of the radiated
acoustic energy and power from/into an acoustic cavity (represented by an
element set) through a portion of the cavity (represented by a node set).
Radiated energy is represented by output variable RADEN, while radiated power is given by output variable RADPOW. The element set representing the acoustic cavity can consist
of just one element in that acoustic cavity. The contribution of the other
acoustic elements belonging to the same cavity is computed automatically.
Input File Usage
ENERGY OUTPUT, ELSET=elset_name, NSET=nset_nameRADEN, RADPOW
Whole Element Energy Output
The whole element energy variables that can be written to the output
database are defined in
Whole Element Energy Density Variables.
Modal steady-state dynamic analysis supports the computation of mean values of
kinetic and potential energies in the finite elements (ELKE and ELSE) as well as the total energy loss for the period due to viscous
and structural damping (ELVD, ELVDE, ELVDG, ELHD, ELHDE, and ELHDG).
Computation of the amplitude and peak values of the kinetic and potential
energies is provided (ELKEA, ELKEP, ELSEA, and ELSEP). In addition, computation of various energy densities is
supported (EKEDEN, EKEDENA, EKEDENP, ESEDEN, ESEDENA, ESEDENP, EVDDEN, EVDDENE, EVDDENG, EHDDEN, EHDDENE, and EHDDENG).
Acoustic Contribution Factors
Computation of the acoustic contribution factors helps you determine the
major noise sources. The procedure for computing the acoustic contribution
factors is based on the modal analysis formulation of acoustic-structural
problems with uncoupled modes. For more information, see
Acoustic Contribution Factors in Mode-Based and Subspace-Based Steady-State Dynamic Analyses.
Variables Available for Mode-Based Steady-State Dynamic Analysis
The following variables are provided specifically for steady-state dynamic
analysis:
Element integration point variables:
PHS
Magnitude and phase angle of all stress components.
PHE
Magnitude and phase angle of all strain components.
PHEPG
Magnitude and phase angles of the electrical potential gradient vector.
PHEFL
Magnitude and phase angles of the electrical flux vector.
PHMFL
Magnitude and phase angle of the mass flow rate in fluid link elements.
PHMFT
Magnitude and phase angle of the total mass flow in fluid link elements.
For connector
elements, the following element output variables are available:
PHCTF
Magnitude and phase angle of connector total forces.
PHCEF
Magnitude and phase angle of connector elastic forces.
PHCVF
Magnitude and phase angle of connector viscous forces.
PHCRF
Magnitude and phase angle of connector reaction forces.
PHCSF
Magnitude and phase angle of connector friction forces.
PHCU
Magnitude and phase angle of connector relative displacements.
PHCCU
Magnitude and phase angle of connector constitutive displacements.
Nodal
variables:
PU
Magnitude and phase angle of all displacement/rotation components at a node.
PPOR
Magnitude and phase angle of the fluid or acoustic pressure at a node.
PHPOT
Magnitude and phase angle of the electrical potential at a node.
PRF
Magnitude and phase angle of all reaction forces/moments at a node.
PHCHG
Magnitude and phase angle of the reactive charge at a node.
The following energy output variables are available in a mode-based
steady-state dynamic analysis:
Total energy output variables:
ALLKE
Kinetic energy. In steady-state dynamic analysis this is the cyclic mean
value.
ALLKEA
Kinetic energy amplitude.
ALLKEP
Kinetic energy peak value.
ALLSE
Recoverable strain energy. In steady-state dynamic analysis this is the
cyclic mean value.
ALLSEA
Recoverable strain energy amplitude.
ALLSEP
Recoverable strain energy peak value.
ALLVD
Energy dissipated by viscous effects including viscous regularization
(except for cohesive elements and cohesive contact), not inclusive of energy
dissipated by automatic stabilization and viscoelasticity. If this variable is
requested for the whole model, it includes energy loss due to the material,
global, and modal damping. If this variable is requested for a part of the
model, energy loss due to the modal damping is not included.
ALLVDE
Energy dissipated by viscous effects due to the material damping.
ALLVDG
Energy dissipated by viscous effects due to the global damping.
ALLVDM
Energy dissipated by viscous effects due to the modal damping. This
variable is available for the whole model.
ALLHD
Energy dissipated due to the structural damping. If this variable is
requested for the whole model, it includes energy loss due to the material,
global, and modal damping. If this variable is requested for a part of the
model, energy loss due to the modal damping is not included.
ALLHDE
Energy dissipated due to the material structural damping.
ALLHDG
Energy dissipated due to the global structural damping.
ALLHDM
Energy dissipated due to the modal structural damping. This variable is
available for the whole model.
ALLWK
External work. (Available only for the whole model.)
EFLOW
Energy flow from a given portion of the model through the given boundary.
PFLOW
Power flow from a given portion of the model through the given boundary.
RADEN
Radiated energy from/into a given acoustic cavity through the given
boundary.
RADPOW
Radiated power from/into a given acoustic cavity through the given
boundary.
Whole element
energy variables:
ELKE
Total kinetic energy in the element. In steady-state dynamic analysis this
is the cyclic mean value.
ELKEA
Total kinetic energy amplitude in the element.
ELKEP
Total kinetic energy peak value in the element.
ELSE
Total elastic strain energy in the element. When the Mullins effect is
modeled with hyperelastic materials, this quantity represents only the
recoverable part of energy in the element. In steady-state dynamic analysis
this is the cyclic mean value.
ELSEA
Total elastic strain energy amplitude in the element.
ELSEP
Total elastic strain energy peak value in the element.
ELVD
Total energy dissipated in the element by viscous effects, not including
energy dissipated by static stabilization or viscoelasticity.
ELVDE
Total energy dissipated in the element by viscous effects due to the
material damping.
ELVDG
Total energy dissipated in the element by viscous effects due to the global
damping.
ELHD
Total energy dissipated in the element due to structural damping. This
variable includes energy loss due to the material and global structural
damping.
ELHDE
Total energy dissipated in the element due to the material structural
damping.
ELHDG
Total energy dissipated in the element due to the global structural
damping.
Whole element
energy density variables:
EKEDEN
Kinetic energy density in the element. In steady-state dynamic analysis
this is the cyclic mean value.
EKEDENA
Kinetic energy density amplitude in the element.
EKEDENP
Kinetic energy density peak value in the element.
ESEDEN
Total elastic strain energy density in the element. When the Mullins effect
is modeled with hyperelastic materials, this quantity represents only the
recoverable part of energy density in the element. This variable is not
available in eigenvalue extraction procedures. In steady-state dynamic analysis
this is the cyclic mean value.
ESEDENA
Total elastic strain energy density amplitude in the element.
ESEDENP
Total elastic strain energy density peak value in the element.
EVDDEN
Total energy dissipated per unit volume in the element by viscous effects,
not inclusive of energy dissipated through static stabilization or
viscoelasticity.
EVDDENE
Total energy dissipated per unit volume in the element by viscous effects
due to the material damping.
EVDDENG
Total energy dissipated per unit volume in the element by viscous effects
due to the global damping.
EHDDEN
Total energy dissipated per unit volume in the element due to structural
damping. This variable includes energy loss due to the material and global
structural damping.
EHDDENE
Total energy dissipated per unit volume in the element due to the material
structural damping.
EHDDENG
Total energy dissipated per unit volume in the element due to the global
structural damping.
The standard output variables U, V, A, and the variable PU listed above correspond to motions relative to the motion of
the primary base in a mode-based analysis. Total values, which include the
motion of the primary base, are also available:
TU
Magnitude of all components of total displacement/rotation at a node.
TV
Magnitude of all components of total velocity at a node.
TA
Magnitude of all components of total acceleration at a node.
PTU
Magnitude and phase angle of all total displacement/rotation components at a
node.
Phase angle of generalized displacements for all modes.
GPV
Phase angle of generalized velocities for all modes.
GPA
Phase angle of generalized acceleration for all modes.
SNE
Elastic strain energy for the entire model per mode.
KE
Kinetic energy for the entire model per mode.
T
External work for the entire model per mode.
BM
Base motion.
Whole model variables such as ALLIE (total strain energy) are available for mode-based steady-state
dynamics as output to the data, results, and/or output database files (see
Output to the Data and Results Files).
Input File Template
HEADING
…
AMPLITUDE, NAME=loadamp
Data lines to define an amplitude curve as a function of frequency (cycles/time)AMPLITUDE, NAME=base
Data lines to define an amplitude curve to be used to prescribe base motion
**
STEP, NLGEOMInclude the NLGEOM parameter so that stress stiffening effects will
be included in the steady-state dynamics stepSTATIC
**Any general analysis procedure can be used to preload the structure
…
CLOAD and/or DLOADData lines to prescribe preloadsTEMPERATURE and/or FIELDData lines to define values of predefined fields for preloading the structureBOUNDARYData lines to specify boundary conditions to preload the structureEND STEP
**
STEPFREQUENCYData line to control eigenvalue extractionBOUNDARYData lines to assign degrees of freedom to the primary baseBOUNDARY, BASE NAME=base2
Data lines to assign degrees of freedom to a secondary baseEND STEP
**
STEPSTEADY STATE DYNAMICSData lines to specify frequency ranges and bias parametersSELECT EIGENMODESData lines to define the applicable mode rangesACOUSTIC CONTRIBUTIONMODAL DAMPINGData lines to define the modal damping factorsBASE MOTION, DOF=dof, AMPLITUDE=base
BASE MOTION, DOF=dof, AMPLITUDE=base, BASE NAME=base2
CLOAD and/or DLOAD, AMPLITUDE=loadamp
Data lines to specify sinusoidally varying, frequency-dependent loads
…
END STEP