Identification of tangent plane based on nearest neighbor interaction
Although four internal element types are used to model the various types of small-sliding contact interactions supported by Abaqus/Standard, all four formulations are based on the notion that a given secondary node always interacts with the same subset of main surface nodes. This nodal subset is initially determined by the Abaqusanalysis input file processor from the undeformed model definition, thus avoiding the need to “track” the secondary node during the course of the analysis. This set of nearest-neighbor nodes to the point on the main surface closest to the secondary node is used to parametrize a contact plane with which the secondary node will interact during the analysis. This concept is illustrated next for the case of a two-dimensional secondary node interacting with a first-order main surface. This formulation can be generalized to second order as well as three-dimensional situations, but this generalization will not be discussed here.
Consider the contact interaction of three nodes—102, 103, and 104—on the secondary surface with a main surface made up of first-order element faces described by nodes 1, 2, and 3, as shown in Figure 1.
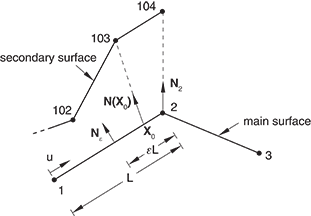
Before initiating the search for the nodal subset of the main surface nodes that will interact with each node on the secondary surface, unit normal vectors are computed for all the nodes on the main surface. For example, the unit normal vector is computed by averaging the unit normal vectors of segments 1–2 and 2–3. The user can also specify the normal vector for each node on the main surface. Additional unit normal vectors are computed for each segment a distance from each end of the segment, where is a fraction and is the length of the segment; e.g., . Currently the value of is set to 0.5, and the user cannot change this value. The unit normals computed are then used to define a smooth varying normal vector, , at any point, , on the main surface.
An “anchor” point on the main surface, , is computed for each secondary node so that the vector formed by the secondary node and coincides with the normal vector . Suppose that a search for the anchor point, , of secondary node 103 reveals that is on segment 1–2. Then, we find that
where and are the coordinates of nodes 1 and 2, respectively, and is calculated so that coincides with . Moreover, the contact plane tangent direction, , at is chosen so that it is perpendicular to ; i.e.,
where is a (constant) rotation matrix.
The small-sliding contact constraint is achieved by requiring that secondary node 103 interact with the tangent plane whose current anchor point coordinates are, at any time, given by
where and , and whose current tangent direction is given by
where and . Since the above expressions for the point and the vector resulted from barycentric (affine) combinations of the points and —that is,
the contact plane will be mapped properly under affine transformations such as translation, scaling (stretching), and rotation.
Next, suppose that a search for the anchor point of secondary node 104 reveals that the anchor point is coincident to the main node 2. In this case the anchor point is chosen to be , or in terms of the coordinates of the three main nodes 1, 2, and 3,
where , , and . The contact tangent direction at is simply
However, we want to express in terms of the coordinates of the three nodes 1, 2, and 3 to be able to track the evolution of the tangent plane. To this end, we solve for the from the equation
subject to the barycentric constraint
The barycentric constraint ensures that the resulting expression for the contact plane tangent direction behaves properly under affine transformations such as translations and rotations.
