Use the Examine Selection
You can examine an object to better understand how to position it. This is helpful to select a face of a parts which is not visible with the current viewpoint without modifying the viewpoint.
-
Click Examine Selection
 in the context toolbar. Alternatively, you can press the
spacebar.
in the context toolbar. Alternatively, you can press the
spacebar.
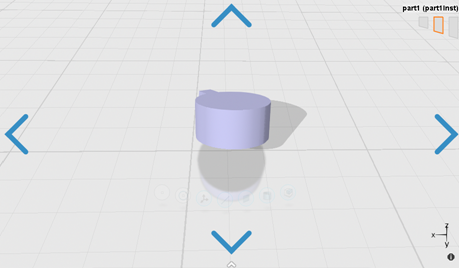
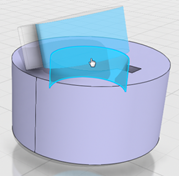
The selection is set to full opacity while the rest of the model is set to semi-transparent opacity. Four blue arrows are displayed on the top, bottom, right and left of the viewer. -
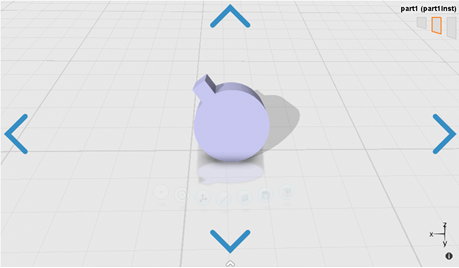
To rotate the object either:
- Click a blue arrow or
- Use the keyboard arrows.

 .
.