Creating a Task
You can select trajectories to generate operations for an arc weld task.
-
From the
Arc section of the action bar,
click Generate Robot Task
 .
.
You are prompted to select a robot.
-
Make a selection in the work area
or Behavior
side tab.
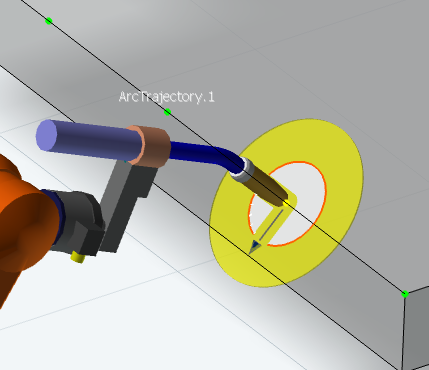
Selected trajectories are added to the list in the Create Operations panel as they are selected.
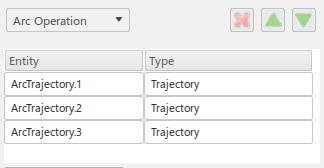
The selections are also highlighted in the work area with a reach status marker placed at the origin of each trajectory tag.

-
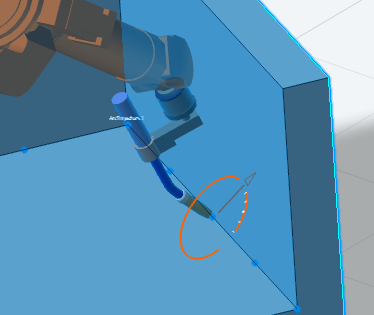
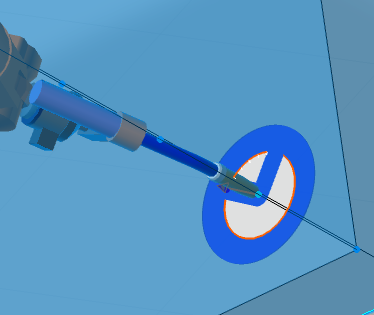
Select a tag.
If the tag is reachable, the robot will move to the selected tag.
The Create Operations dialog becomes hidden, and an editable properties dialog box for the tag appears. This dialog box displays all of the properties associated with the selected tag.
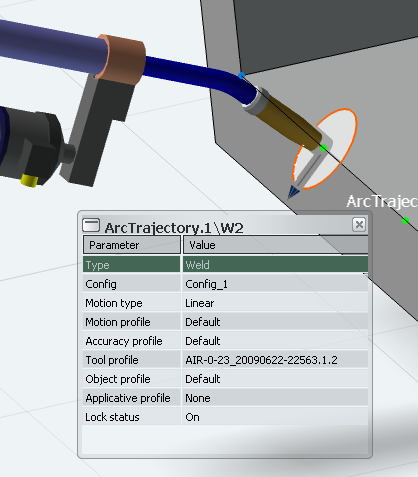
- Type displays the type of tag that was set at the time of trajectory creation and cannot be changed.
- Config represents the configuration string of the robot.
You can click on its value to change it.

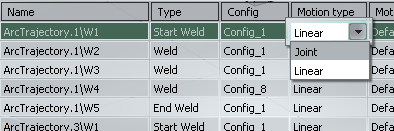
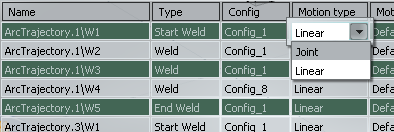
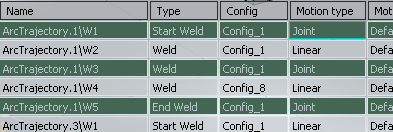
- Motion type represents the motion type associated with this
point. It can be set to Joint or Linear.
- Controller profiles represent the currently assigned profiles, including:
- Motion profile
- Accuracy profile
- Tool profile
- Object profile
- Applicative profile
- Lock status allows you lock or unlock the tag. When set to On (locked), the properties of the selected tag cannot be changed unless it is first set to Off (unlocked).
Note: You can also select a trajectory to display its properties: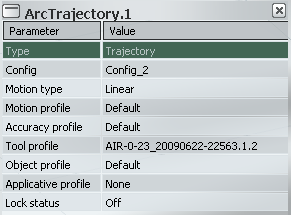
Changes made in this dialog box are applied to all tags belonging to the selected trajectory when the dialog box is closed. You can prevent individual tag properties from being overwritten by setting their Lock status to On.
-
Select OK to create the task and close the Create
Operations.
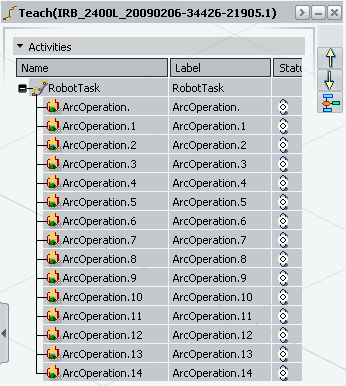
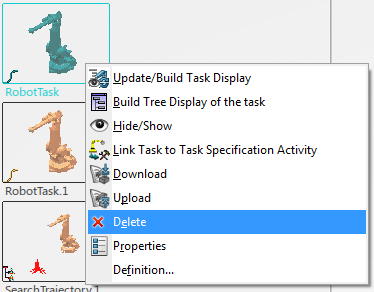
The new task appears in the Behavior tab of the immersive browser.

You can view and edit the operations that have been created in Teach mode (accessible by double-clicking the task).