Redefine the Offset to a Point on a Part
This shows you how to redefine the offset to a point on a part.
-
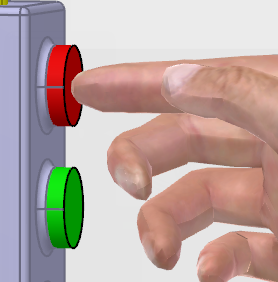
Click
Offset
 .
.
-
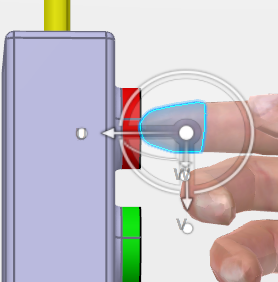
Select the
Left Hand.
The Offset Definition dialog box appears and the Robot snaps to the hand.
The Segment section of the dialog box shows the text Hand and Left.
-
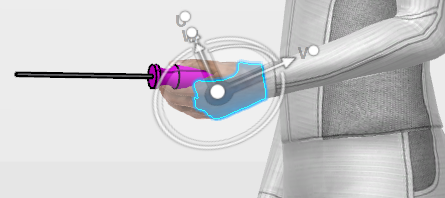
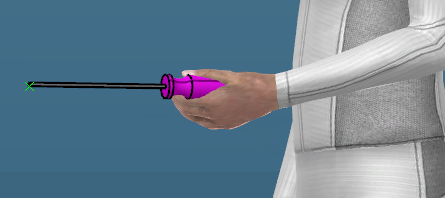
Place the
Robot
at the end of the screwdriver.
This is the new location of the IK control point, or a new location of the end effector.
Note: The offset uses to transfer a control point (the left hand in this case) to another location. Usually, this new location corresponds to the tip of a tool (a screwdriver for example) the manikin grabs. By doing so, when manipulating the hand with an IK command, the robot snaps to the offset, at the tip of the tool. The same way, when executing a reach with the left end, it is the tip of the screwdriver that reaches the target and not the hand.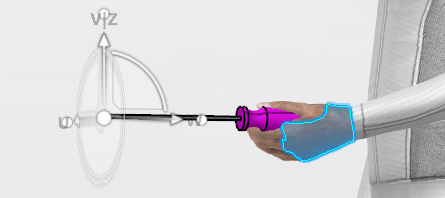
-
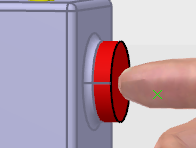
Click
OK.
The Offset is now transferred from the hand to the screwdriver showing the green X on the tip of the screwdriver.
 from the
from the
 .
.