Creating an OPERATE Device Activity | ||||||
|
| |||||
-
Click
Create OPERATE.
 .
The command prompt asks you: Select Reached Object(s) to Operate.
.
The command prompt asks you: Select Reached Object(s) to Operate.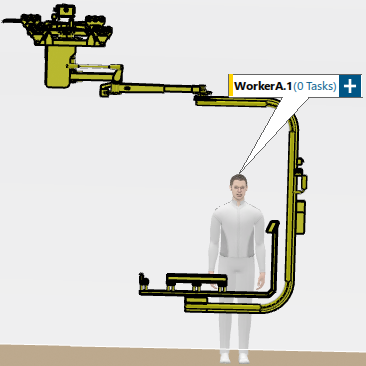
-
Select whether you want to
Reuse the Device Task and the
Motion Basis.

Within the Create OPERATE,
the Material Handling,
Create a Grab Activity
 and
Create a Release Activity
and
Create a Release Activity
 toolbar becomes available.
toolbar becomes available. 
See Using Grab and Release Activity in OPERATE Device. -
Click
Insert Jog Move
 when the required position is reached.
when the required position is reached.
-
Use the
Previous Jog Move
 and
Next Jog Move to review positions.
and
Next Jog Move to review positions.
-
Click
OK in the Operate Dialog box
A thumbnail of the Human Task is created.
See also About Human Locations and Creating a Human Location.