Problem description
This example consists of a two-dimensional axisymmetric plate penetrated by a high-speed projectile. The plate, which is made of Aluminum 2024–T4, has a thickness of 1.3 mm and is 50 mm in diameter. All degrees of freedom on the circumference of the plate are constrained. The outline of the model is shown in Figure 1. The projectile is modeled as an analytical rigid surface with a body diameter of 20 mm, an enclosed tip angle of 40°, and a mass of 0.11 kg attached to the reference node.
Figure 2 shows one of the finite element meshes used to model the plate, with 5 axisymmetric elements in the through-thickness direction and 50 axisymmetric elements in the radial direction. Nodes along the Z-axis in an axisymmetric model have no implicit constraints to remain at . In most axisymmetric problems it is appropriate to specify radial constraints for these nodes. However, in this example radial constraints for the nodes initially at the center of the plate are inappropriate, since the projectile will form a hole in the center of the plate. The tip of the projectile is assigned a small negative radial position to avoid the possibility of missed contact at the edge of the analytical surface due to numerical round-off. The nodes of the plate on the Z-axis will expand radially upon impact of the projectile, allowing projectile penetration and the formation of a hole. Element removal as a result of material failure is also modeled and further will contribute to enlargement of the hole. A potentially significant “petaling” mechanism, in which cracks emanate radially in the plate as the projectile passes through, is not studied in this example because of the two-dimensional nature of the axisymmetric models used.
If element failure and removal are not included in a high-speed impact problem such as this, the analysis will likely terminate prematurely as a result of severe element distortion. A node-based surface comprised of all the nodes on the plate is used for contact modeling purposes because element-based surfaces should not be defined over elements that fail and because nodes internal to the plate may become exposed once surrounding elements start failing. When all the elements attached to a node have failed, the node acts as a point mass and is still active in contact interactions. This aspect can be significant with respect to accurate modeling of momentum transfer in highly dynamic problems.
The results of interest are the velocity of the projectile at the end of the analysis and the work performed by the projectile, which is equal to the projectile's loss of kinetic energy. Analyses are conducted at initial projectile speeds of 400 m/s, 600 m/s, 800 m/s, and 1000 m/s. The projectile speed decreases by a small fraction in each analysis. The time period of the analysis is set such that the projectile penetration, assuming no decrease in velocity, is 55 mm. The results are compared to experimental results, as well as results obtained from analytical expressions based on simplifying assumptions commonly used for this type of problem. To determine the best modeling approach, three preliminary studies are conducted: a mesh convergence study, a comparison of the contact algorithms (kinematic and penalty), and a material model study. All preliminary studies are completed with an initial projectile velocity of 600 m/s. The parametric study capability of Abaqus is used to facilitate these studies.
Mesh convergence is studied for 5, 7, and 9 elements through the thickness and 50, 70, and 90 elements in the radial direction. Each mesh is biased toward the center of the disc, as in the 5 × 50 element mesh shown in Figure 2. At least four linear reduced-integration elements through the thickness should be used when bending may be significant. For high-speed impact problems such as this, bending may not be highly significant, because the material may fail in shear prior to the occurrence of significant bending; however, fairly refined meshes are considered to provide examples of meshes that could also be used for low-speed impact studies. The input file pp_mesh_study.inp is parameterized for the mesh convergence study and is driven by the parametric study script pp_mesh_study.psf. The material is modeled with Mises plasticity with isotropic hardening and a plastic shear failure strain of 50%. The default kinematic contact algorithm is used for the mesh convergence study.
The effect on the results of the choice of the contact algorithm (kinematic or penalty) is investigated next, using the same material model and a mesh found to be efficient and accurate. The script pp_con_study.psf drives the parameterized input file pp_con_study.inp. We anticipate that the results will not differ significantly for the two contact algorithms.
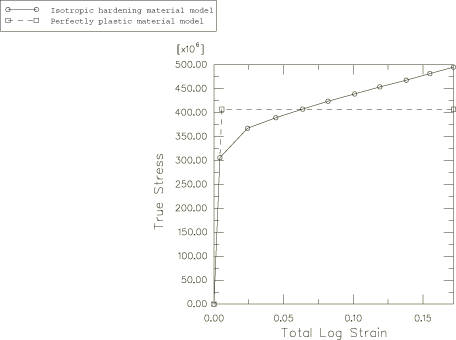
The third preliminary study is completed to determine the influence of the material model on the analysis results. Material models of two basic types are considered: Mises plasticity with isotropic hardening and Mises plasticity without hardening but a higher yield stress. The hardening data for the first case are calculated using the function = 44.2 + 29.2, where the units for stress are ksi and the strain is plastic strain. This function is consistent with data available from the Aluminum Association and represents an average of many tests. These hardening data are used for demonstration purposes; they may not be applicable to all situations. The perfectly plastic model is a simplification. Both models have similar strain energy for strains of about 15%. Plots of stress versus total log strain for both material models are shown in Figure 3. Two values of the equivalent plastic strain at failure (17% and 50%) are considered for each type of plasticity data. The value of 17% corresponds to the percent of total elongation at failure of a 2-inch specimen in a standard tensile test, as published by the Aluminum Association. The value of 50% is commonly used in high-rate dynamic analyses. Element failure is controlled with the shear failure model. The input file pp_mat_1_study.inp models the material with isotropic hardening, and the input file pp_mat_2_study.inp uses a perfectly plastic material model. These files are parameterized and are driven by the parametric study scripts pp_mat_1_study.psf and pp_mat_2_study.psf, respectively.
Analytical expressions based on simplifying assumptions for this type of problem are derived in Backman and Goldsmith. Two approaches, referred to as the energy method and the momentum method, give slightly different estimates for the final velocity of the projectile. With the energy method the resulting expression for the final velocity is
where m is the mass. The work done () is given by
where R is the radius of the projectile, is the length of the conical nose, is the approximated yield strength of the material when modeled without hardening, t is the plate thickness, and is the material density.
The momentum method gives the final velocity as
where is the half cone angle.