Defining the Constitutive Response of Cohesive Elements Using a Traction-Separation Description
The features described in this section are primarily intended for bonded interfaces
where the interface thickness is negligibly small. In such cases it might be straightforward
to define the constitutive response of the cohesive layer directly in terms of traction versus
separation.
If the interface adhesive layer has a finite thickness and macroscopic properties (such as
stiffness and strength) of the adhesive material are available, it might be more appropriate
to model the response using conventional material models. The former approach is discussed in
this section, while the latter approach is discussed in Defining the Constitutive Response of Cohesive Elements Using a Continuum Approach.
Cohesive behavior defined directly in terms of a traction-separation law:
can be used to model the delamination at interfaces in composites
directly in terms of traction versus separation;
allows specification of material data such as the fracture energy as a
function of the ratio of normal to shear deformation (mode mix) at the
interface;
assumes a linear elastic traction-separation law prior to damage;
Defining Constitutive Response in Terms of Traction-Separation Laws
To define the constitutive response of the cohesive element directly in
terms of traction versus separation, you choose a traction-separation response
when defining the section behavior of the cohesive elements.
The available traction-separation model in Abaqus assumes initially linear elastic behavior (see Defining Elasticity in Terms of Tractions and Separations for Cohesive Elements) followed by the
initiation and evolution of damage. The elastic behavior is written in terms of an elastic
constitutive matrix that relates the nominal stresses to the nominal strains across the
interface. The nominal stresses are the force components divided by the original area at
each integration point. The nominal strains are the separations divided by the original
thickness at each integration point with some averaging applied to the transverse shear
components. The default value of the original constitutive thickness is 1.0 if
traction-separation response is specified, which ensures that the nominal strain is equal to
the separation (that is, relative displacements of the top and bottom faces). The
constitutive thickness used for traction-separation response is typically different from the
geometric thickness (which is typically close or equal to zero). See Specifying the Constitutive Thickness for a discussion on
how to modify the constitutive thickness.
The nominal traction stress vector, , consists of three
components (two components in two-dimensional problems):
,
,
and (in three-dimensional problems) ,
which represent the normal (along the local 3-direction in three dimensions and
along the local 2-direction in two dimensions) and the two shear tractions
(along the local 1- and 2-directions in three dimensions and along the local
1-direction in two dimensions), respectively. The corresponding separations are
denoted by ,
,
and .
Denoting by
the original thickness of the cohesive element, the nominal strains can be
defined as
The elastic behavior can then be written as
The elasticity matrix provides fully coupled behavior between all components of the traction
vector and separation vector and can depend on temperature and field variables. Set the
off-diagonal terms in the elasticity matrix to zero if uncoupled behavior between the normal
and shear components is required.
Optionally, for the uncoupled traction behavior a compression factor can be
specified; this ensures that the compressive stiffness is equal to the
specified factor times the tensile stiffness, .
This factor affects only the traction response for separation in the normal
direction; the shear behavior is not affected.
Input File Usage
Use the following
option to define uncoupled traction-separation behavior:
The material parameters, such as the interfacial elastic stiffness, for a
traction-separation model can be better understood by studying the equation
that represents the displacement of a truss of length L,
elastic stiffness E, and original area
A, due to an axial load P:
This equation can be rewritten as
where
is the nominal stress and
is the stiffness that relates the nominal stress to the displacement. Likewise,
the total mass of the truss, assuming a density ,
is given by
The above equations suggest that the actual length L can be replaced with
1.0 (to ensure that the strain is the same as the displacement) if the stiffness and the
density are appropriately reinterpreted. In particular, the stiffness is and the density is , where the true length of the truss is used in these equations. The
density represents mass per unit area instead of mass per unit volume.
These ideas can be carried over to a cohesive layer of initial thickness
.
If the adhesive material has stiffness
and density ,
the stiffness of the interface (relating the nominal traction to the nominal
strain) is given by
and the density of the interface is given by .
As discussed earlier, the default choice of the constitutive thickness
for modeling the response in terms of traction versus separation is 1.0
regardless of the actual thickness of the cohesive layer. With this choice, the
nominal strains are equal to the corresponding separations. When the
constitutive thickness of the cohesive layer is “artificially” set to 1.0,
ideally you should specify
and
(if needed) as the material stiffness and density, respectively, as calculated
with the true thickness of the cohesive layer.
The above formulas provide a recipe for estimating the parameters required for modeling the
traction-separation behavior of an interface in terms of the material properties of the bulk
adhesive material. As the thickness of the interface layer tends to zero, the above
equations imply that the stiffness, , tends to infinity and the density, , tends to zero. This stiffness is often chosen as a penalty parameter. A
very large penalty stiffness is detrimental to the stable time increment in Abaqus/Explicit and might result in ill-conditioning of the element operator in Abaqus/Standard. Recommendations for the choice of the stiffness and density of an interface for an Abaqus/Explicit analysis such that the stable time increment is not adversely affected are provided in
Stable Time Increment in Abaqus/Explicit.
Modeling Viscoelastic Traction-Separation Behavior in Abaqus/Explicit
Time domain viscoelasticity can be used in
Abaqus/Explicit
to model rate-dependent behavior of cohesive elements with traction-separation
elasticity. The evolution equation for the normal and two shear nominal
tractions take the form:
where ,
,
and
are the instantaneous nominal tractions at time t in the
normal and the two local shear directions, respectively. The functions
and
represent the dimensionless shear and normal relaxation moduli, respectively.
See
Defining Viscoelastic Behavior for Traction-Separation Elasticity in Abaqus/Explicit
for additional details and usage information.
You can also combine time domain viscoelasticity with the models for rate-dependent progressive
damage and failure described in the next sections. This combination allows modeling
rate-dependent behavior both during the initial elastic response (prior to damage
initiation), as well as during damage progression.
Damage Modeling
Both Abaqus/Standard and Abaqus/Explicit allow modeling of progressive damage and failure in cohesive layers whose response is
defined in terms of traction-separation. By comparison, only Abaqus/Explicit allows modeling of progressive damage and failure for cohesive elements modeled with
conventional materials (Defining the Constitutive Response of Cohesive Elements Using a Continuum Approach). Damage of the
traction-separation response is defined within the same general framework used for
conventional materials (see About Progressive Damage and Failure). This general
framework allows the combination of several damage mechanisms acting simultaneously on the
same material. Each failure mechanism consists of three ingredients: a damage initiation
criterion, a damage evolution law, and a choice of element removal (or deletion) on reaching
a completely damaged state. While this general framework is the same for traction-separation
response and conventional materials, many details of how the various ingredients are defined
are different. Therefore, the details of damage modeling for traction-separation response
are presented below.
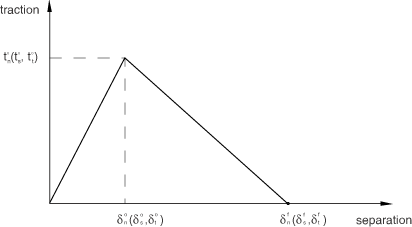
The initial response of the cohesive element is assumed to be linear as discussed above. However,
once a damage initiation criterion is met, material damage can occur according to a
user-defined damage evolution law. Figure 1 shows a typical traction-separation response with a failure mechanism. If the damage
initiation criterion is specified without a corresponding damage evolution model, Abaqus will evaluate the damage initiation criterion for output purposes only; there is no
effect on the response of the cohesive element (that is, no damage will occur). The cohesive
layer does not undergo damage under pure compression.
Figure 1. Typical traction-separation response.
Damage Initiation
As the name implies, damage initiation refers to the beginning of degradation of the response of
a material point. The process of degradation begins when the stresses and strains satisfy
certain damage initiation criteria that you specify. Several damage initiation criteria are
available and are discussed below. Each damage initiation criterion also has an output
variable associated with it to indicate whether the criterion is met. A value of 1 or higher
indicates that the initiation criterion has been met (see Output for further
details). Damage initiation criteria that do not have an associated evolution law affect
only output. Thus, you can use these criteria to evaluate the propensity of the material to
undergo damage without actually modeling the damage process (that is, without actually
specifying damage evolution).
In the discussion below, ,
,
and
represent the peak values of the nominal stress when the deformation is either
purely normal to the interface or purely in the first or the second shear
direction, respectively. Likewise, ,
,
and
represent the peak values of the nominal strain when the deformation is either
purely normal to the interface or purely in the first or the second shear
direction, respectively. With the initial constitutive thickness
,
the nominal strain components are equal to the respective components of the
relative displacement—,
,
and —between
the top and bottom of the cohesive layer. The symbol
used in the discussion below represents the Macaulay bracket with the usual
interpretation. The Macaulay brackets are used to signify that a pure
compressive deformation or stress state does not initiate damage.
Maximum Nominal Stress Criterion
Damage is assumed to initiate when the maximum nominal stress ratio (as
defined in the expression below) reaches a value of one. This criterion can be
represented as
Damage is assumed to initiate when the maximum nominal strain ratio (as
defined in the expression below) reaches a value of one. This criterion can be
represented as
Damage is assumed to initiate when a quadratic interaction function
involving the nominal stress ratios (as defined in the expression below)
reaches a value of one. This criterion can be represented as
Damage is assumed to initiate when a quadratic interaction function
involving the nominal strain ratios (as defined in the expression below)
reaches a value of one. This criterion can be represented as
Rate-Dependent Damage Initiation in Abaqus/Explicit
In Abaqus/Explicit you can define the damage initiation criteria as a function of the effective rate of
separation. You can combine this definition with rate-dependent damage evolution to
describe the rate-dependent delamination behavior for a cohesive interface.
Input File Usage
Use the following option to specify rate-dependent damage initiation:
The damage evolution law describes the rate at which the material stiffness
is degraded once the corresponding initiation criterion is reached. The general
framework for describing the evolution of damage in bulk materials (as opposed
to interfaces modeled using cohesive elements) is described in
Damage Evolution and Element Removal for Ductile Metals.
Conceptually, similar ideas apply for describing damage evolution in cohesive
elements with a constitutive response that is described in terms of traction
versus separation; however, many details are different.
A scalar damage variable, D, represents the overall
damage in the material and captures the combined effects of all the active
mechanisms. It initially has a value of 0. If damage evolution is modeled,
D monotonically evolves from 0 to 1 upon further loading
after the initiation of damage. The stress components of the
traction-separation model are affected by the damage according to
where ,
and
are the stress components predicted by the elastic traction-separation behavior
for the current strains without damage.
To describe the evolution of damage under a combination of normal and shear
deformation across the interface, it is useful to introduce an effective
displacement (Camanho and Davila, 2002) defined as
The equivalent nominal strain can be defined as
Mixed-Mode Definition
The mode mix of the deformation fields in the cohesive zone quantify the
relative proportions of normal and shear deformation.
Abaqus
uses three measures of mode mix, two that are based on energies and one that is
based on tractions. You can choose one of these measures when you specify the
mode dependence of the damage evolution process. Denoting by
,
,
and
the work done by the tractions and their conjugate relative displacements in
the normal, first, and second shear directions, respectively, and defining
,
the mode-mix definitions based on energies are as follows:
Clearly, only two of the three quantities defined above are independent. It
is also useful to define the quantity
to denote the portion of the total work done by the shear traction and the
corresponding relative displacement components. As discussed later,
Abaqus
requires that you specify material properties related to damage evolution as
functions of
(or, equivalently, )
and .
Abaqus computes the energy quantities described above either based on the current state of
deformation (nonaccumulative measure of energy) or based on the deformation history
(accumulative measure of energy) at an integration point. The former approach is useful in
mixed-mode simulations where the primary energy dissipation mechanism is associated with
the creation of new surfaces due to failure in the cohesive zone. Typically, such problems
are adequately described utilizing the methods of linear elastic fracture mechanics. The
latter approach provides an alternate way of defining the mode-mix and might be useful in
situations where other significant dissipation mechanisms also govern the overall
structural response.
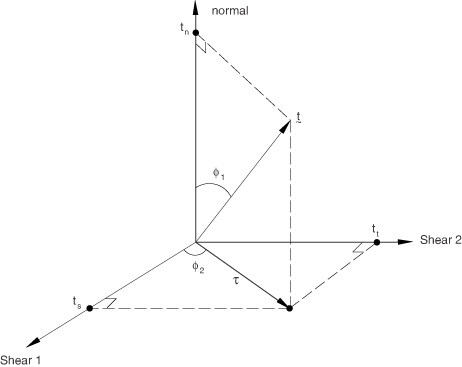
The corresponding definitions of the mode mix based on traction components
are given by
where
is a measure of the effective shear traction. The angular measures used in the
above definition (before they are normalized by the factor
)
are illustrated in
Figure 2.
Figure 2. Mode mix measures based on traction.
Input File Usage
Use the
following option to use the mode-mix definition based on nonaccumulated
energies:
The mode-mix ratios defined in terms of the different energy quantities and tractions can be
quite different in general. The following examples illustrate this point. In terms of
energies a deformation in the purely normal direction is one for which and , irrespective of the values of the normal and the shear tractions. In
particular, for a material with coupled traction-separation behavior both the normal and
shear tractions might be nonzero for a deformation in the purely normal direction. For
this case the definition of mode mix based on energies would indicate a purely normal
deformation, while the definition based on tractions would suggest a mix of both normal
and shear deformation.
When the mode mix is defined based on accumulated energies, an artificial path-dependence might
be introduced in the mixed-mode behavior that might not be consistent, for example, with
predictions that are based on linear elastic fracture mechanics. Therefore, if an
interface is first loaded purely in the normal deformation mode, unloaded, and
subsequently loaded in a purely shear deformation mode, the mode-mix ratios based on
accumulated energies at the end of the above deformation path evaluate to (assuming the
shear deformation to be in the local-1 direction only) and . On the other hand, the mode-mix ratios based on nonaccumulated
energies evaluate to and at the end of the above deformation path.
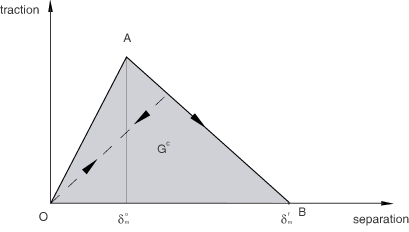
Damage Evolution Definition
There are two components to the definition of the evolution of damage. The
first component involves specifying either the effective displacement at
complete failure, ,
relative to the effective displacement at the initiation of damage,
;
or the energy dissipated due to failure,
(see
Figure 3).
Figure 3. Linear damage evolution.
The second component to the definition of damage evolution is the specification of the nature of
the evolution of the damage variable, D, between initiation of damage
and final failure. This can be done by either defining linear or exponential softening
laws or specifying D directly as a tabular function of the effective
displacement relative to the effective displacement at damage initiation. The material
data described above will in general be functions of the mode mix, temperature, and field
variables.
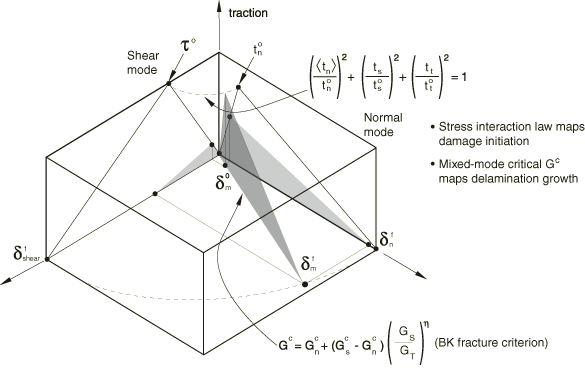
Figure 4
is a schematic representation of the dependence of damage initiation and
evolution on the mode mix, for a traction-separation response with isotropic
shear behavior. The figure shows the traction on the vertical axis and the
magnitudes of the normal and the shear separations along the two horizontal
axes. The unshaded triangles in the two vertical coordinate planes represent
the response under pure normal and pure shear deformation, respectively. All
intermediate vertical planes (that contain the vertical axis) represent the
damage response under mixed mode conditions with different mode mixes. The
dependence of the damage evolution data on the mode mix can be defined either
in tabular form or, in the case of an energy-based definition, analytically.
The manner in which the damage evolution data are specified as a function of
the mode mix is discussed later in this section.
Figure 4. Illustration of mixed-mode response in cohesive elements.
Unloading subsequent to damage initiation is always assumed to occur
linearly toward the origin of the traction-separation plane, as shown in
Figure 3.
Reloading subsequent to unloading also occurs along the same linear path until
the softening envelope (line AB) is reached.
Once the softening envelope is reached, further reloading follows this envelope
as indicated by the arrow in
Figure 3.
Evolution Based on Effective Displacement
You specify the quantity (that is, the effective displacement at complete failure, , relative to the effective displacement at damage initiation, , as shown in Figure 3) as a tabular function of the mode mix, temperature, and field variables. In addition,
you also choose either a linear or an exponential softening law that defines the detailed
evolution (between initiation and complete failure) of the damage variable,
D, as a function of the effective displacement beyond damage
initiation. Alternatively, instead of using linear or exponential softening, you can
specify the damage variable, D, directly as a tabular function of the
effective displacement after the initiation of damage, ; mode mix; temperature; and field variables.
Linear Damage Evolution
For linear softening (see
Figure 3)
Abaqus
uses an evolution of the damage variable, D, that reduces
(in the case of damage evolution under a constant mode mix, temperature, and
field variables) to the expression proposed by Camanho and Davila (2002),
namely:
In the preceding expression and in all later references,
refers to the maximum value of the effective displacement attained during the
loading history. The assumption of a constant mode mix at a material point
between initiation of damage and final failure is customary for problems
involving monotonic damage (or monotonic fracture).
Input File Usage
Use the
following option to specify linear damage evolution:
For exponential softening (see
Figure 5)
Abaqus
uses an evolution of the damage variable, D, that reduces
(in the case of damage evolution under a constant mode mix, temperature, and
field variables) to
In the expression above is a nondimensional material parameter that defines the rate of damage
evolution and is the exponential function.
Figure 5. Exponential damage evolution.
Input File Usage
Use the
following option to specify exponential softening:
For tabular softening you define the evolution of D directly in tabular
form. D must be specified as a function of the effective
displacement relative to the effective displacement at initiation, mode mix,
temperature, and field variables.
Input File Usage
Use the
following option to define the damage variable directly in tabular form:
Damage evolution can be defined based on the energy that is dissipated as a
result of the damage process, also called the fracture energy. The fracture
energy is equal to the area under the traction-separation curve (see
Figure 3).
You specify the fracture energy as a material property and choose either a
linear or an exponential softening behavior.
Abaqus
ensures that the area under the linear or the exponential damaged response is
equal to the fracture energy.
The dependence of the fracture energy on the mode mix can be specified
either directly in tabular form or by using analytical forms as described
below. When the analytical forms are used, the mode-mix ratio is assumed to be
defined in terms of energies.
Tabular Form
The simplest way to define the dependence of the fracture energy is to
specify it directly as a function of the mode mix in tabular form.
Input File Usage
Use the
following option to specify fracture energy as a function of the mode mix in
tabular form:
The dependence of the fracture energy on the mode mix can be defined based
on a power law fracture criterion. The power law criterion states that failure
under mixed-mode conditions is governed by a power law interaction of the
energies required to cause failure in the individual (normal and two shear)
modes. It is given by
The mixed-mode fracture energy
when the above condition is satisfied. In other words,
You specify the quantities ,
,
and ,
which refer to the critical fracture energies required to cause failure in the
normal, the first, and the second shear directions, respectively.
Input File Usage
Use the
following option to define the fracture energy as a function of the mode mix
using the analytical power law fracture criterion:
The Benzeggagh-Kenane fracture criterion (Benzeggagh and Kenane, 1996) is particularly useful
when the critical fracture energies during deformation purely along the first and the
second shear directions are the same; that is, . It is given by
where ,
,
and
is a material parameter. You specify ,
,
and .
Input File Usage
Use the
following option to define the fracture energy as a function of the mode mix
using the analytical BK fracture criterion:
For linear softening (see
Figure 3)
Abaqus
uses an evolution of the damage variable, D, that reduces
to
where
with
as the effective traction at damage initiation.
refers to the maximum value of the effective displacement attained during the
loading history.
Input File Usage
Use the
following option to specify linear damage evolution:
For exponential softening
Abaqus
uses an evolution of the damage variable, D, that reduces
to
In the expression above
and
are the effective traction and displacement, respectively.
is the elastic energy at damage initiation. In this case the traction might not
drop immediately after damage initiation, which is different from what is seen
in
Figure 5.
Input File Usage
Use the
following option to specify exponential softening:
Defining Damage Evolution Data as a Tabular Function of Mode Mix
As discussed earlier, the material data defining the evolution of damage can
be tabular functions of the mode mix. The manner in which this dependence must
be defined in
Abaqus
is outlined below for mode-mix definitions based on energy and traction,
respectively. In the following discussion it is assumed that the evolution is
defined in terms of energy. Similar observations can also be made for evolution
definitions based on effective displacement.
Mode Mix Based on Energy
For an energy-based definition of mode mix, in the most general case of a
three-dimensional state of deformation with anisotropic shear behavior the
fracture energy, ,
must be defined as a function of
and .
The quantity
is a measure of the fraction of the total deformation that is shear, while
is a measure of the fraction of the total shear deformation that is in the
second shear direction.
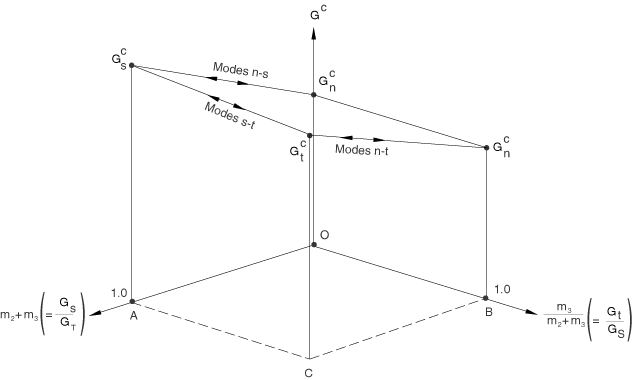
Figure 6
shows a schematic of the fracture energy versus mode mix behavior.
Figure 6. Fracture energy as a function of mode mix.
The limiting cases of pure normal and pure shear deformations in the first
and second shear directions are denoted in
Figure 6
by ,
,
and ,
respectively. The lines labeled “Modes n-s,” “Modes n-t,” and “Modes s-t” show
the transition in behavior between the pure normal and the pure shear in the
first direction, pure normal and pure shear in the second direction, and pure
shears in the first and second directions, respectively. In general,
must be specified as a function of
at various fixed values of .
In the discussion that follows we refer to a data set of
versus
corresponding to a fixed
as a “data block.” The following guidelines are useful in defining the fracture
energy as a function of the mode mix:
For a two-dimensional problem
needs to be defined as a function of
(
in this case) only. The data column corresponding to
must be left blank. Hence, essentially only one “data block” is needed.
For a three-dimensional problem with isotropic shear response, the
shear behavior is defined by the sum
and not by the individual values of
and .
Therefore, in this case a single “data block” (the “data block” for
)
also suffices to define the fracture energy as a function of the mode mix.
In the most general case of three-dimensional problems with anisotropic shear behavior, several
“data blocks” would be needed. As discussed earlier, each “data block” would contain versus at a fixed value of . In each “data block” can vary between 0 and . The case (the first data point in any “data block”), which corresponds to a
purely normal mode, can never be achieved when (that is, the only valid point on line
OB in Figure 6 is the point O, which corresponds to a purely
normal deformation). However, in the tabular definition of the fracture energy as a
function of mode mix, this point simply serves to set a limit that ensures a
continuous change in fracture energy as a purely normal state is approached from
various combinations of normal and shear deformations. Hence, the fracture energy of
the first data point in each “data block” must always be set equal to the fracture
energy in a purely normal mode of deformation ().
As an example of the anisotropic shear case, consider that you want to
input three “data blocks” corresponding to fixed values of
0., 0.2, and 1.0, respectively. For each of the three “data blocks,” the first
data point must be
for the reasons discussed above. The rest of the data points in each “data
block” define the variation of the fracture energy with increasing proportions
of shear deformation.
Mode Mix Based on Traction
The fracture energy needs to be specified in tabular form of versus and . Thus, needs to be specified as a function of at various fixed values of . A “data block” in this case corresponds to a set of data for versus , at a fixed value of . In each “data block” can vary from 0 (purely normal deformation) to 1 (purely shear
deformation). An important restriction is that each data block must specify the same
value of the fracture energy for . This restriction ensures that the energy required for fracture as the
traction vector approaches the normal direction does not depend on the orientation of
the projection of the traction vector on the shear plane (see Figure 2).
Evaluating Damage When Multiple Criteria Are Active
When multiple damage initiation criteria and associated evolution
definitions are used for the same material, each evolution definition results
in its own damage variable, ,
where the subscript i represents the
ith damage system. The overall damage variable,
D, is computed based on the individual
,
as explained in
Evaluating Overall Damage When Multiple Criteria Are Active,
for damage in bulk materials.
Rate-Dependent Damage Evolution in Abaqus/Explicit
In Abaqus/Explicit you can define the damage evolution laws as a functions of the effective rate of
separation. You can combine this definition with rate-dependent damage initiation to
describe the rate-dependent delamination behavior for a cohesive interface.
Input File Usage
Use the following option to specify rate-dependent damage evolution:
You have control over how
Abaqus
treats cohesive elements with severe damage. By default, the upper bound to the
overall damage variable at a material point is .
You can reduce this upper bound as discussed in
Controlling Element Deletion and Maximum Degradation for Materials with Damage Evolution.
You can control what happens to the cohesive element when the damage reaches
this limit, as discussed below.
By default, once the overall damage variable reaches at all of its material points and none of its material points are in
compression, the cohesive elements, except for the pore pressure cohesive elements, are
removed (deleted). See Controlling Element Deletion and Maximum Degradation for Materials with Damage Evolution for details. This
element removal approach is often appropriate for modeling complete fracture of the bond and
separation of components. Once removed, cohesive elements offer no resistance to subsequent
penetration of the components, so it might be necessary to model contact between the
components as discussed in Defining Contact between Surrounding Components.
Alternatively, you can specify that a cohesive element should remain in the model even after the
overall damage variable reaches . In this case the stiffness of the element in tension and shear remains
constant (degraded by a factor of 1 − over the initial undamaged stiffness). This choice is appropriate if the
cohesive elements must resist interpenetration of the surrounding components even after they
have completely degraded in tension and shear (see Defining Contact between Surrounding Components). In Abaqus/Explicit it is recommended that you suppress bulk viscosity in the cohesive elements by setting
the scale factors for the linear and quadratic bulk viscosity parameters to zero using
section controls (see Section Controls).
Uncoupled Transverse Shear Response
An optional linear elastic transverse shear behavior can be defined to
provide additional stability to cohesive elements, particularly after damage
has occurred. The transverse shear behavior is assumed to be independent of the
regular material response and does not undergo any damage.
Material models exhibiting softening behavior and stiffness degradation
often lead to severe convergence difficulties in implicit analysis programs,
such as
Abaqus/Standard.
A common technique to overcome some of these convergence difficulties is the
use of viscous regularization of the constitutive equations, which causes the
tangent stiffness matrix of the softening material to be positive for
sufficiently small time increments.
The traction-separation laws can be regularized in
Abaqus/Standard
using viscosity by permitting stresses to be outside the limits set by the
traction-separation law. The regularization process involves the use of a
viscous stiffness degradation variable, ,
which is defined by the evolution equation:
where
is the viscosity parameter representing the relaxation time of the viscous
system and D is the degradation variable evaluated in the
inviscid backbone model. The damaged response of the viscous material is given
as
The approximate amount of energy associated with viscous regularization over
the whole model or over an element set is available using output variable ALLCD.
Equivalent nominal strain,
(Abaqus/Explicit
only). When the constitutive thickness of the cohesive layer is "artificially"
set as 1.0,
the value of NEEQ is equal to the value of the effective displacement,
.
NEEQR
Equivalent nominal strain rate,
(Abaqus/Explicit
only). When the constitutive thickness of the cohesive layer is "artificially"
set as 1.0,
the value of NEEQR is equal to the value of the effective rate of separation,
.
The effective rate of separation is used to evaluate rate-dependent damage
initiation and evolution criteria.
STATUS
Status of element (the status of an element is 1.0 if the element is active,
0.0 if the element is not).
SDEG
Overall value of the scalar damage variable, D.
DMICRT
All damage initiation criteria components.
MAXSCRT
Maximum value of the nominal stress damage initiation criterion at a
material point during the analysis. It is evaluated as
MAXECRT
Maximum value of the nominal strain damage initiation criterion at a
material point during the analysis. It is evaluated as
MMIXDME
Mode mix ratio during damage evolution. It is evaluated as
.
In general, it varies with time at a given integration point. This variable is
set to
before initiation of damage.
MMIXDMI
Mode mix ratio at damage initiation. It is evaluated as
at the time of damage initiation at an integration point for the very first
time. It remains constant with time at a given integration point. This variable
is set to
before initiation of damage.
QUADSCRT
Maximum value of the quadratic nominal stress damage initiation criterion at
a material point during the analysis. It is evaluated as
QUADECRT
Maximum value of the quadratic nominal strain damage initiation criterion at
a material point during the analysis. It is evaluated as
ALLCD
The approximate amount of energy over the whole model or over an element set
that is associated with viscous regularization in
Abaqus/Standard.
Corresponding output variables (such as CENER, ELCD, and ECDDEN) represent the energy associated with viscous regularization at
the integration point level and element level (the last quantity represents the
energy per unit volume in the element), respectively.
For the variables above that indicate whether a certain damage initiation criterion has been
satisfied or not, a value that is less than 1.0 indicates that the criterion has not been
satisfied, while a value of 1.0 or higher indicates that the criterion has been satisfied.
If damage evolution is specified for this criterion, the maximum value of this variable does
not exceed 1.0. However, if damage evolution is not specified for the initiation criterion,
this variable can have values higher than 1.0. The extent to which the variable is higher
than 1.0 can be considered to be a measure of the extent to which this criterion has been
violated.
References
Benzeggagh, M.L., and M. Kenane, “Measurement
of Mixed-Mode Delamination Fracture Toughness of Unidirectional Glass/Epoxy
Composites with Mixed-Mode Bending
Apparatus,” Composites Science and
Technology, vol. 56, pp. 439–449, 1996.
Camanho, P.P., and C. G. Davila, “Mixed-Mode
Decohesion Finite Elements for the Simulation of Delamination in Composite
Materials,” NASA/TM-2002–211737, pp. 1–37, 2002.