Abaqus
offers a wide variety of shell modeling options.
Conventional Shell Versus Continuum Shell
Shell elements are used to model structures in which one dimension, the
thickness, is significantly smaller than the other dimensions. Conventional
shell elements use this condition to discretize a body by defining the geometry
at a reference surface. In this case the thickness is defined through the
section property definition. Conventional shell elements have displacement and
rotational degrees of freedom.
In contrast, continuum shell elements discretize an entire three-dimensional
body. The thickness is determined from the element nodal geometry. Continuum
shell elements have only displacement degrees of freedom. From a modeling point
of view continuum shell elements look like three-dimensional continuum solids,
but their kinematic and constitutive behavior is similar to conventional shell
elements.
Figure 1
illustrates the differences between a conventional shell and a continuum shell
element.
Figure 1. Conventional versus continuum shell element.
Conventions
The conventions that are used for shell elements are defined below.
Definition of Local Directions on the Surface of a Shell in Space
The default local directions used on the surface of a shell for definition
of anisotropic material properties and for reporting stress and strain
components are defined in
Conventions.
You can define other directions by defining a local orientation (see
Orientations),
except for SAX1, SAX2, and SAX2T elements (Axisymmetric Shell Element Library),
which do not support orientations. A spatially varying local coordinate system
defined with a distribution (Distribution Definition)
can be assigned to shell elements. For SAXA elements (Axisymmetric Shell Elements with Nonlinear, Asymmetric Deformation)
any anisotropic material definition must be symmetric with respect to the
r–z plane at
and .
In large-deformation (geometrically nonlinear) analysis these local
directions rotate with the average rotation of the surface at that point. They
are output as directions in the current configuration except in the shell
elements in
Abaqus/Standard
that provide only large rotation but small strain (element types STRI3, STRI65, S4R5, S8R, S8RT, S8R5, S9R5—see
Choosing a Shell Element),
where they are output as directions in the reference configuration.
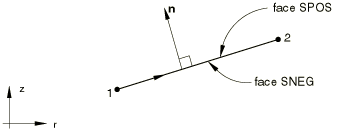
Positive Normal Definition for Conventional Shell Elements
The “top” surface of a conventional shell element is the surface in the
positive normal direction and is referred to as the positive
(SPOS) face for contact definition. The
“bottom” surface is in the negative direction along the normal and is referred
to as the negative (SNEG) face for contact
definition. Positive and negative are also used to designate top and bottom
surfaces when specifying offsets of the reference surface from the shell's
midsurface.
The positive normal direction defines the convention for pressure load
application and output of quantities that vary through the thickness of the
shell. A positive pressure load applied to a shell element produces a load that
acts in the direction of the positive normal.
Three-Dimensional Conventional Shells
For shells in space the positive normal is given by the right-hand rule
going around the nodes of the element in the order that they are specified in
the element definition. See
Figure 2.
Figure 2. Positive normals for three-dimensional conventional shells.
Axisymmetric Conventional Shells
For axisymmetric conventional shells (including the SAXA1n and SAXA2n elements that allow for nonsymmetric deformation) the positive
normal direction is defined by a 90° counterclockwise rotation from the
direction going from node 1 to node 2. See
Figure 3.
Figure 3. Positive normal for conventional axisymmetric shells.
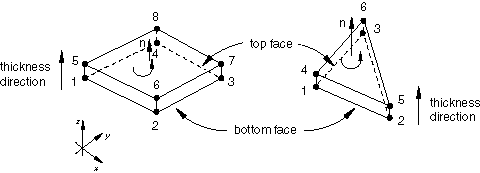
Normal Definition for Continuum Shell Elements
Figure 4
illustrates the key geometrical features of continuum shells.
Figure 4. Default normals and thickness direction for continuum shell
elements.
It is important that the continuum shells are oriented properly, since the
behavior in the thickness direction is different from that in the in-plane
directions. By default, the element top and bottom faces and, hence, the
element normal, stacking direction, and thickness direction are defined by the
nodal connectivity. For the triangular in-plane continuum shell element (SC6R) the face with corner nodes 1, 2, and 3 is the bottom face; and
the face with corner nodes 4, 5, and 6 is the top face. For the quadrilateral
continuum shell element (SC8R) the face with corner nodes 1, 2, 3, and 4 is the bottom face;
and the face with corner nodes 5, 6, 7, and 8 is the top face. The stacking
direction and thickness direction are both defined to be the direction from the
bottom face to the top face. Additional options for defining the element
thickness direction, including one option that is independent of nodal
connectivity, are presented below.
Surfaces on continuum shells can be defined by specifying the face
identifiers
S1–S6
identifying the individual faces as defined in
Continuum Shell Element Library.
Free surface generation can also be used.
Pressure loads applied to faces
P1–P6 are
defined similar to continuum elements, with a positive pressure directed into
the element.
Defining the Stacking and Thickness Direction
By default, the continuum shell stacking direction and thickness direction
are defined by the nodal connectivity as illustrated in
Figure 4.
Alternatively, you can define the element stacking direction and thickness
direction by either selecting one of the element's isoparametric directions or
by using an orientation definition.
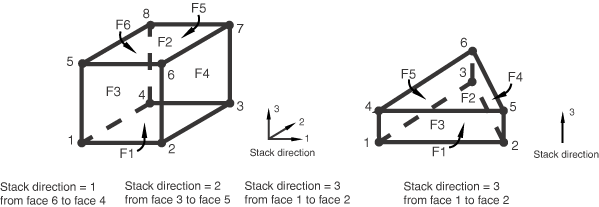
Defining the Stacking and Thickness Direction Based on the Element Isoparametric Direction
You can define the element stacking direction to be along one of the
element's isoparametric directions (see
Figure 5
for element stack directions). The 8-node hexahedron continuum shell has three
possible stacking directions; the 6-node in-plane triangular continuum shell
has only one stack direction, which is in the element 3-isoparametric
direction. The default stacking direction is 3, providing the same thickness
and stacking direction as outlined in the previous section.
To obtain a desired thickness direction, the choice of the isoparametric
direction depends on the element connectivity. For a mesh-independent
specification, use an orientation-based method as described below.
Figure 5. Stack directions for SC6R and SC8R elements.
Input File Usage
Use one of the following options to define the element
stacking direction based on the element's isoparametric directions:
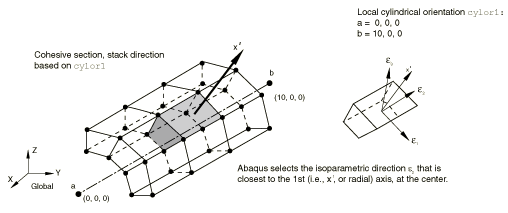
Defining the Stacking and Thickness Direction Based on an Orientation Definition
Alternatively, you can define the element stacking direction based on a
local orientation definition. For shell elements the orientation definition
defines an axis about which the local 1 and
2 material directions may be rotated. This
axis also defines an approximate normal direction. The element stacking and
thickness directions are defined to be the element isoparametric direction that
is closest to this approximate normal (see
Figure 6).
Figure 6. Example illustrating the use of a cylindrical system to define the
stacking direction.
Numbering of Section Points through the Shell Thickness
The section points through the thickness of the shell are numbered
consecutively, starting with point 1. For shell sections integrated during the
analysis, section point 1 is exactly on the bottom surface of the shell if
Simpson's rule is used, and it is the point that is closest to the bottom
surface if Gauss quadrature is used. For general shell sections, section point
1 is always on the bottom surface of the shell.
For a homogeneous section the total number of section points is defined by
the number of integration points through the thickness. For shell sections
integrated during the analysis, you can define the number of integration points
through the thickness. The default is five for Simpson's rule and three for
Gauss quadrature. For general shell sections, output can be obtained at three
section points.
For a composite section the total number of section points is defined by
adding the number of integration points per layer for all of the layers. For
shell sections integrated during the analysis, you can define the number of
integration points per layer. The default is three for Simpson's rule and two
for Gauss quadrature. For general shell sections, the number of section points
for output per layer is three.
Default Output Points
In
Abaqus/Standard
the default output points through the thickness of a shell section are the
points that are on the bottom and top surfaces of the shell section (for
integration with Simpson's rule) or the points that are closest to the bottom
and top surfaces (for Gauss quadrature). For example, if five integration
points are used through a single layer shell, output will be provided for
section points 1 (bottom) and 5 (top).
In
Abaqus/Explicit
all section points through the thickness of a shell section are written to the
results file for element output requests.