Body force (give magnitude as force per unit volume) in the global
X-direction.
Load ID (*DLOAD): BY
FL−3
Body force (give magnitude as force per unit volume) in the global
Y-direction.
Load ID (*DLOAD): BZ
FL−3
Body force (give magnitude as force per unit volume) in the global
Z-direction.
Load ID (*DLOAD): BXNU
FL−3
Nonuniform body force (give magnitude as force per unit volume) in the
global X-direction, with magnitude supplied via user
subroutine
DLOAD in
Abaqus/Standard
and
VDLOAD in
Abaqus/Explicit.
Load ID (*DLOAD): BYNU
FL−3
Nonuniform body force (give magnitude as force per unit volume) in the
global Y-direction, with magnitude supplied via user
subroutine
DLOAD in
Abaqus/Standard
and
VDLOAD in
Abaqus/Explicit.
Load ID (*DLOAD): BZNU
FL−3
Nonuniform body force (give magnitude as force per unit volume) in the
global Z-direction, with magnitude supplied via user
subroutine
DLOAD in
Abaqus/Standard
and
VDLOAD in
Abaqus/Explicit.
Load ID (*DLOAD): CENT(S)
FL−4
(ML−3T−2)
Centrifugal load (magnitude defined as ,
where
is the mass density and
is the angular speed).
Load ID (*DLOAD): CENTRIF(S)
T−2
Centrifugal load (magnitude is input as ,
where
is the angular speed).
Load ID (*DLOAD): CORIO(S)
FL−4T
(ML−3T−1)
Coriolis force (magnitude input ,
where
is the mass density and
is the angular speed). The load stiffness due to Coriolis loading is not
accounted for in direct steady-state dynamics analysis.
Load ID (*DLOAD): GRAV
LT−2
Gravity loading in a specified direction (magnitude is input as
acceleration).
Load ID (*DLOAD): HPn(S)
FL−2
Hydrostatic pressure on face n, linear in global
Z. A positive pressure is directed into the element.
Load ID (*DLOAD): Pn
FL−2
Pressure on face n. A positive pressure is
directed into the element.
Load ID (*DLOAD): PnNU
FL−2
Nonuniform pressure on face n with magnitude
supplied via user subroutine
DLOAD in
Abaqus/Standard
and
VDLOAD in
Abaqus/Explicit.
A positive pressure is directed into the element.
Load ID (*DLOAD): ROTA(S)
T−2
Rotary acceleration load (magnitude is input as ,
where
is the rotary acceleration).
Load ID (*DLOAD): ROTDYNF(S)
T−1
Rotordynamic load (magnitude is input as ,
where
is the angular velocity).
Load ID (*DLOAD): SBF(E)
FL−5T2
Stagnation body force in global X-,
Y-, and Z-directions.
Load ID (*DLOAD): SPn(E)
FL−4T2
Stagnation pressure on face n.
Load ID (*DLOAD): TRSHRn
FL−2
Shear traction on face n.
Load ID (*DLOAD): TRSHRnNU(S)
FL−2
Nonuniform shear traction on face n with
magnitude and direction supplied via user subroutine
UTRACLOAD.
Load ID (*DLOAD): TRVECn
FL−2
General traction on face n.
Load ID (*DLOAD): TRVECnNU(S)
FL−2
Nonuniform general traction on face n with
magnitude and direction supplied via user subroutine
UTRACLOAD.
Load ID (*DLOAD): VBF(E)
FL−4T
Viscous body force in global X-,
Y-, and Z-directions.
Load ID (*DLOAD): VPn(E)
FL3T
Viscous pressure on face n, applying a pressure
proportional to the velocity normal to the face and opposing the motion.
Elastic foundation on face n. A positive pressure
is directed into the element.
Distributed Heat Fluxes
Distributed heat fluxes are available for all elements with temperature
degrees of freedom. They are specified as described in
Thermal Loads.
*dflux
Load ID (*DFLUX): BF
JL−3T−1
Heat body flux per unit volume.
Load ID (*DFLUX): BFNU(S)
JL−3T−1
Nonuniform heat body flux per unit volume with magnitude supplied via user
subroutine
DFLUX.
Load ID (*DFLUX): Sn
JL−2T−1
Heat surface flux per unit area into face n.
Load ID (*DFLUX): SnNU(S)
JL−2T−1
Nonuniform heat surface flux per unit area into face
n with magnitude supplied via user subroutine
DFLUX.
Film Conditions
Film
conditions are available for all elements with temperature degrees of freedom.
They are specified as described in
Thermal Loads.
*film
Load ID (*FILM): Fn
JL−2T−1−1
Film coefficient and sink temperature (units of )
provided on face n.
Load ID (*FILM): FnNU(S)
JL−2T−1−1
Nonuniform film coefficient and sink temperature (units of
)
provided on face n with magnitude supplied via user
subroutine
FILM.
Radiation Types
Radiation
conditions are available for all elements with temperature degrees of freedom.
They are specified as described in
Thermal Loads.
*radiate
Load ID (*RADIATE): Rn
Dimensionless
Emissivity and sink temperature (units of )
provided on face n.
Surface-Based Loading
Distributed Loads
Surface-based distributed loads are specified as described in
Distributed Loads.
*dsload
Load ID (*DSLOAD): HP(S)
FL−2
Hydrostatic pressure applied to the element surface, linear in global
Z. The pressure is positive in the direction opposite to
the surface normal.
Load ID (*DSLOAD): P
FL−2
Pressure applied to the element surface. The pressure is positive in the
direction opposite to the surface normal.
Load ID (*DSLOAD): PNU
FL−2
Nonuniform pressure applied to the element surface with magnitude supplied
via user subroutine
DLOAD in
Abaqus/Standard
and
VDLOAD in
Abaqus/Explicit.
The pressure is positive in the direction opposite to the surface normal.
Load ID (*DSLOAD): SP(E)
FL−4T2
Stagnation pressure applied to the element reference surface.
Load ID (*DSLOAD): TRSHR
FL−2
Shear traction on the element reference surface.
Load ID (*DSLOAD): TRSHRNU(S)
FL−2
Nonuniform shear traction on the element reference surface with magnitude
and direction supplied via user subroutine
UTRACLOAD.
Load ID (*DSLOAD): TRVEC
FL−2
General traction on the element reference surface.
Load ID (*DSLOAD): TRVECNU(S)
FL−2
Nonuniform general traction on the element reference surface with magnitude
and direction supplied via user subroutine
UTRACLOAD.
Load ID (*DSLOAD): VP(E)
FL3T
Viscous surface pressure. The viscous pressure is proportional to the
velocity normal to the element face and opposing the motion.
Distributed Heat Fluxes
Surface-based heat fluxes are available for all elements with temperature
degrees of freedom. They are specified as described in
Thermal Loads.
*dsflux
Load ID (*DSFLUX): S
JL−2T−1
Heat surface flux per unit area into the element surface.
Load ID (*DSFLUX): SNU(S)
JL−2T−1
Nonuniform heat surface flux per unit area into the element surface with
magnitude supplied via user subroutine
DFLUX.
Film Conditions
Surface-based film conditions are available for all elements with
temperature degrees of freedom. They are specified as described in
Thermal Loads.
*sfilm
Load ID (*SFILM): F
JL−2T−1−1
Film coefficient and sink temperature (units of )
provided on the element surface.
Load ID (*SFILM): FNU(S)
JL−2T−1−1
Nonuniform film coefficient and sink temperature (units of
)
provided on the element surface with magnitude supplied via user subroutine
FILM.
Radiation Types
Surface-based
radiation conditions are available for all elements with temperature degrees of
freedom. They are specified as described in
Thermal Loads.
*sradiate
Load ID (*SRADIATE): R
Dimensionless
Emissivity and sink temperature (units of )
provided on the element surface.
Element Output
If a local coordinate system is not assigned to the element, the
stress/strain components, as well as the section forces/strains, are in the
default directions on the surface defined by the convention given in
Conventions.
If a local coordinate system is assigned to the element through the section
definition (Orientations),
the stress/strain components and the section forces/strains are in the surface
directions defined by the local coordinate system.
The local
directions defined in the reference configuration are rotated into the current
configuration by the average material rotation.
In the case of
composite shells the components of section forces, section strains, and
transverse shear stress estimates for stacked continuum shells (CTSHR13 and CTSHR23) are reported in the local orientation defined for the entire
section (or the default shell coordinate directions if no section orientation
is used). Components of stress, strain, and transverse shear stress (TSHR13 and TSHR23) are given with respect to the individual layer orientations.
Stress, Strain, and Other Tensor Components
Stress and other tensors (including strain tensors) are available. All
tensors have the same components. For example, the stress components are as
follows:
S11
Local
direct stress.
S22
Local
direct stress.
S12
Local
shear stress.
The stress in the thickness direction, ,
is reported as zero to the output database as discussed in
Abaqus/Standard Output Variable Identifiers.
may be obtained through the average section stress variable SSAVG6. Output of in-plane stress components of continuum shell
elements does not include Poisson effects due to changes in the thickness
direction.
Heat Flux Components
Available for elements with temperature degrees of freedom.
HFL1
Heat flux in the X-direction.
HFL2
Heat flux in the Y-direction.
HFL3
Heat flux in the Z-direction.
Section Forces, Moments, and Transverse Shear Forces
SF1
Direct membrane force per unit width in local 1-direction.
SF2
Direct membrane force per unit width in local 2-direction.
SF3
Shear membrane force per unit width in local 1–2 plane.
SF4
Transverse shear force per unit width in local 1-direction.
SF5
Transverse shear force per unit width in local 2-direction.
SF6
Thickness stress integrated over the element thickness.
SM1
Bending moment force per unit width about local 2-axis.
SM2
Bending moment force per unit width about local 1-axis.
SM3
Twisting moment force per unit width in local 1–2 plane.
The section force and moment resultants per unit length in the normal basis
directions in a given shell section of thickness h can be
defined on this basis as
where stress in the thickness direction
is constant through the thickness. Outputs of in-plane section forces of
continuum shell elements do not include Poisson effects due to changes in the
thickness direction.
Average Section Stresses
SSAVG1
Average membrane stress in local 1-direction.
SSAVG2
Average membrane stress in local 2-direction.
SSAVG3
Average membrane stress in local 1–2 plane.
SSAVG4
Average transverse shear stress in local 1-direction.
SSAVG5
Average transverse shear stress in local 2-direction.
SSAVG6
Average thickness stress in the local 3-direction.
The average section stresses are defined as
where
and h is the current section thickness.
is constant through the thickness.
Section Strains, Curvatures, and Transverse Shear Strains
Section thickness, which is the current section thickness if geometric
nonlinearity is considered; otherwise, it is the initial section thickness.
Transverse Shear Stress Estimates
TSHR13
13-component of transverse shear stress.
TSHR23
23-component of transverse shear stress.
Estimates of the transverse shear stresses are available at section
integration points as output variables TSHR13 or TSHR23 for both Simpson's rule and Gauss quadrature. For Simpson's
rule output of variables TSHR13 or TSHR23 should be requested at nondefault section points, since the
default output is at section point 1 of the shell section where the transverse
shear stresses vanish.
For numerically integrated sections, estimates of the interlaminar shear
stresses in composite sections—i.e., the transverse shear stresses at the
interface between two composite layers—can be obtained only by using Simpson's
rule. With Gauss quadrature no section integration point exists at the
interface between composite layers.
Unlike the S11, S22, and S12 in-surface stress components, TSHR13 and TSHR23 are not calculated from the constitutive behavior at points
through the shell section. They are estimated by matching the elastic strain
energy associated with shear deformation of the shell section with that based
on piecewise quadratic variation of the transverse shear stress across the
section, under conditions of bending about one axis (see
Transverse shear stiffness in composite shells and offsets from the midsurface).
Therefore, interlaminar shear stress calculation is supported only when each
layer of the shell section is defined using an elastic material model or a
user-defined material model with the elastic transverse shear moduli defined.
If you specify the transverse shear stiffness values, interlaminar shear stress
output is not available. TSHR13 and TSHR23 are valid only for sections that have one element through the
thickness direction. For sections with two or more continuum shell elements
stacked in the thickness direction, output variables SSAVG4 and SSAVG5 or CTSHR13 and CTSHR23 should be used instead. An example using SSAVG4 and SSAVG5 to estimate the transverse shear stress distribution in stacked
continuum shells can be found in
Composite shells in cylindrical bending.
Transverse Shear Stress Estimates for Stacked Continuum Shells
CTSHR13
13-component of transverse shear stress for stacked continuum shells.
CTSHR23
23-component of transverse shear stress for stacked continuum shells.
Estimates of the transverse shear stresses that take into account the
continuity of interlaminar transverse shear stress for stacked continuum shells
are available at section integration points as output variables CTSHR13 or CTSHR23 for both Simpson's rule and Gauss quadrature. CTSHR13 or CTSHR23 are available only in
Abaqus/Standard.
CTSHR13 and CTSHR23 are not calculated from the constitutive behavior at points
through the shell section. They are estimated by assuming a quadratic variation
of shear stress across the element section and by enforcing the continuity of
interface transverse shear between adjoining continuum elements in a stack. It
is also assumed that the transverse shear is zero at the free boundaries of a
stack.
The intended use case for CTSHR13 and CTSHR23 is to estimate the through-the-thickness transverse shear
stress for flat or nearly flat composite plates that are modeled with stacked
continuum shell elements where each continuum element in the stack models a
single material layer. Central to CTSHR13 and CTSHR23 is the concept of a stack of continuum shell
elements.
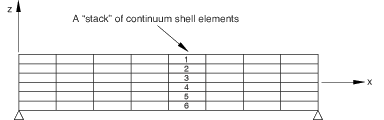
During input file preprocessing
Abaqus
partitions all the continuum shells in a model into stacks. A
stack is defined as a contiguous set of continuum shells whose
first and last elements lie on a free boundary and who are connected through
shared nodes on the top and bottom element surfaces (as determined by the
elements' stack directions). In this context a free boundary is
a top or bottom surface of a continuum shell element that is not connected
through its nodes to another continuum shell element. For example, assuming
that the stack direction of all the elements in
Figure 1
is in the z-direction, elements 1–6 would form a stack.
Figure 1. Composite plate meshed with six stacked continuum shells through the
thickness.
It is important to emphasize that stacks of continuum shells are connected
through shared nodes, not through constraints or other elements. Suppose, for
example, that in
Figure 1
element pairs 1–2, 2–3, 4–5, and 5–6 are connected to each other through shared
nodes, but elements 3 and 4 are connected through a constraint (such as a tied
constraint). In that case
Abaqus
would interpret the bottom surface of element 3 and the top surface of element
4 as free boundaries; therefore, elements 1–3 would form one stack, and
elements 4–6 would form a second independent stack. For another example,
suppose that element 4 is not a continuum shell element. In this case elements
1–3 would form one stack, and elements 5–6 would form another stack. In a final
example, suppose the stack directions of elements 1–5 are in the global
z-direction and the stack direction of element 6 is in the
global x-direction. In this case elements 1–5 would form a
stack separate from element 6. In the three cases just discussed the computed
values of CTSHR13 and CTSHR23 would probably not be what you wanted. It is more likely that
you want elements 1–6 to be in the same stack. It may be necessary to make
changes in your model to achieve this. You can review the partitioning of the
continuum shell elements into stacks in the data file by making a model
definition data request.
The continuum shell elements in a stack must satisfy certain criteria;
otherwise,
Abaqus
marks the stack as invalid with respect to
computing CTSHR13 or CTSHR23. If a stack is marked as invalid, CTSHR13 or CTSHR23, if requested, are not computed and are set to zero for all
continuum shell elements in that stack. If a continuum shell element does not
have an elastic material model, if you specify the transverse shear for any
element in the stack, or if the element is specified as rigid, that stack is
marked as invalid. A stack is also marked as invalid if the normal of any
element in a stack is not within 10° of the average normal for the stack. In
addition, if a continuum shell element is removed during the analysis, the
stack to which the element belongs is marked as invalid until the element is
reactivated.
There are several other certain restrictions on CTSHR13 and CTSHR23. CTSHR13 and CTSHR23 are not available in any continuum shell element with a
multi-layer composite material definition. However, having a multi-layer
composite element in the stack does not invalidate the stack. For the purposes
of computing CTSHR13 and CTSHR23, a maximum of 500 continuum shell elements can be put in any
individual stack. If more than 500 continuum shell elements are stacked on top
of each other,
Abaqus
issues a warning message during input file preprocessing, and CTSHR13 and CTSHR23 are not computed and are set to zero for all continuum shell
elements in the model. CTSHR13 and CTSHR23 are not available if element operations are run in parallel
(see
Parallel Execution in Abaqus/Standard).
CTSHR13 or CTSHR23 are currently available only for static and direct-integration
dynamic analyses.
An example using CTSHR13 and CTSHR23 to estimate the transverse shear stress distribution in stacked
continuum shells can be found in
Composite shells in cylindrical bending.