For an overview of submodeling that includes some details common to both
node-based and surface-based submodeling, see
About Submodeling.
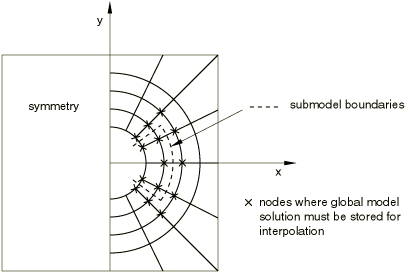
Your submodel analysis is driven, either partly or completely, from the
results obtained from a global model analysis. The results from the global
model are interpolated onto the nodes on the appropriate parts of the boundary
of the submodel (see
Figure 1).
Thus, the response at the boundary of the local region is defined by the
solution for the global model. The driven nodes and any loads applied to the
local region determine the solution in the submodel.
Figure 1. The global model.
Different Types of Node-Based Submodeling
Three different techniques are available for nodal-based submodeling.
Same-to-Same Submodeling
The linear or nonlinear response of a global model consisting of regions
of solid, shell, or membrane elements can be used to drive the submodel
response of similarly meshed regions of the submodel. The driven variables can
be displacements or temperatures.
Shell-to-Solid Submodeling
The linear or nonlinear response of a global shell model can be used to
drive the submodel response of a solid submodel. The driven variables are
displacements, which are determined from global model displacements and
rotations.
Acoustic Submodeling
The linear or nonlinear response of a global, structural model can be used
to drive the acoustic response of a fluid region of any size if the forces
exerted on the structure by the fluid are small. This is often the case for
metal structures in air, building interiors, or for sound propagation from a
liquid to air. In the case of a liquid and a gas, no special procedures need be
followed; the pressure degrees of freedom couple straightforwardly. In the case
of a structure driving a fluid, you must ensure that the degrees of freedom to
be driven in the submodel exist among the global model results. Several
alternatives exist. A thin layer of fluid elements, with the same properties as
the submodel fluid, can be added to the global model; this element set and its
nodes can then be used to drive the submodel in the usual manner.
Alternatively, you can create acoustic interface elements on the surface of the
submodel and drive the corresponding nodes with the structural nodes (see
Fully and sequentially coupled acoustic-structural analysis of a muffler).
In problems where the fluid exerts large pressures on the structure, the
mechanical response of the structure may be of interest. Acoustic-to-structure
submodeling can be used in such problems. The submodel in these problems is a
part of the structural component of the global model. The acoustic pressure
obtained from solving a coupled acoustic-structural global analysis is used to
drive the submodel on the surface it shares with the fluid medium. Other
boundaries of the submodel may be driven using the displacements of the
structural component of the global model via solid-to-solid submodeling. The
acoustic-to-structure submodel analysis solves an uncoupled structural
force-displacement problem. The acoustic pressure from the global model is
interpolated to the submodel driven nodes. The tributary area and the outward
normal associated with the driven node are used to convert the interpolated
acoustic pressure to a concentrated load acting at that location (see
Miscellaneous submodeling tests).
Saving the Results from the Global Model
The results from the global analysis must be saved at all nodes required for
the interpolation of the driven variables to the boundary of the submodel (see
Figure 1).
The results (.fil) file or the output database
(.odb) file can be used for this purpose.
Saving the Results to the Results File
In each step of the global model whose solution will be used to drive the
submodel, write the nodal results for all driven variables to the results file
(see
Output to the Data and Results Files).
These results must be written in the global coordinate system of the model. The
submodel can refer only to a global model results file that is from a binary
compatible platform.
When the global model is run in
Abaqus/Explicit
and results file output is requested, the results are written to the selected
results (.sel) file; this file needs to be converted into
a results (.fil) file using the
convert option (see
Abaqus/Standard and Abaqus/Explicit Execution).
Input File Usage
NODE FILE
(In Abaqus/StandardGLOBAL=NO should not be used on the NODE FILE option.)
Saving the Results to the Output Database
In each step of the global model whose solution will be used to drive the
submodel, write the nodal results for all driven variables to the output
database in ODB or
SIM format (see
Output to the Output Database).
Unlike the results file, nodal output to the output database is always written
in the global directions. The output database can be transferred to any
platform since it is binary neutral.
By default, the nodal output to the output database is written using
single precision, which may not be sufficient for certain classes of problems;
for example, submodels undergoing large rigid body motions (consider also
surface-based submodeling in these cases—see
Surface-Based Submodeling).
For such analyses request the nodal output to the fullest possible precision
(see
Abaqus/Standard and Abaqus/Explicit Execution).
Saving Results from a Global Model with a Physical Time Scale
If the global analysis in
Abaqus/Standard
involves a physical time scale and the results file is to be used in the
submodel analysis, request that the results file output be written at the
beginning of the step (the zero increment) for all steps in the global analysis
(see
About Output).
Abaqus
will then have the complete solution history (including the solution state at
the beginning of a step) from which a submodel may be driven. If the zero
increment results are not requested, incorrect results will be obtained if the
step time in the submodel is less than the step time of the first increment on
the results file. Instead of interpolating between the results at the start of
the step and the results of the first increment on the results file,
Abaqus
will simply use the results of the first increment as long as the submodel step
time is less than the step time of the first increment on the results file. The
zero increment request is not required in
Abaqus/Explicit,
because the results are always written to the results file at the beginning of
each step. Similarly, the results will always be correctly interpolated when
using the output database to transfer the results from the global model to the
submodel, because the zero increment is always written to the output database.
Referring to the Global Model Results from the Submodel Analysis
You must define the source of the global solution results.
Using the Submodel Interface
You provide the name of the global results file or output database file (in
ODB or SIM format);
the file extension is optional. If the file extension is omitted, Abaqus uses in order, the results file, the ODB output
database file, or the SIM database file.
Input File Usage
abaqusjob=submodel_input_fileglobalmodel=global_results_file
or global_output_database or
sim_database_file
Using the Field Import Interface
You provide the SIM database name to refer to the
global model results when using the field import interface.
Specifying the driven nodes does not activate the driven variables: they must be
activated by specifying the appropriate submodel boundary conditions.
All nodes of the submodel where variables will be driven in any step (see Figure 2) must be specified as driven nodes since the list of nodes cannot be extended
subsequent to its initial definition (even at restart). However, variables at the nodes
given do not have to be driven in all steps: the choice of which variables are driven in a
particular step is made as part of a submodel boundary condition definition, as discussed
later.
Figure 2. The magnified submodel.
Input File Usage
SUBMODELlist of nodes or node set labels or, for acoustic-to-structure submodeling, the name of an element-based structural surface
The SUBMODEL option must be included
in the model definition portion of the input file for the submodel analysis. Multiple
SUBMODEL options are allowed;
however, in this case you must ensure that the driven nodes specified on the data line
of one option are separate and distinct from the nodes specified on the data lines of
all the other options.
Specifying the Driven Nodes in Shell-to-Solid Submodeling
In shell-to-solid submodeling, the submodel is made up of solid elements and replaces a
region where conventional shell elements are used in the global model. In this case Abaqus expects that all the driven nodes on the submodel belong to solid elements and are
driven from a global model region that is entirely made up of shell elements. The
boundary where the submodel is driven is a set of surfaces in the submodel but is a set
of lines in the shell reference surface in the global model, as shown in Figure 3. The dashed line on the shell model is replaced by the shaded surfaces of the solid
element submodel.
Figure 3. Shell-to-solid submodeling.
Whenever shell-to-solid submodeling is used, you must define the maximum shell
thickness in the global model, given in the units used for the models. If a shell offset
is defined in the global model, the shell thickness must be set equal to twice the
maximum distance from the top or bottom shell surface to the shell reference surface.
Input File Usage
SUBMODEL, SHELL TO SOLID, SHELL THICKNESS=thickness
If more than one SUBMODEL option is used, the
SHELL TO SOLID parameter must be
included on every option.
Specifying the Driven Nodes in Acoustic-to-Structure Submodeling
The global analysis for acoustic-to-structure submodeling problems is performed as a
coupled acoustic-structural analysis. The acoustic nodal pressures from the global
analysis must be written to the results file for the acoustic mesh in contact with the
structural surface of interest. In the submodel analysis acoustic pressures from the
global analysis drive the user-specified structural surface of interest. The driven
nodes for the submodel are the nodes lying on the specified surface. Only element-based
surfaces are allowed in acoustic-to-structure submodeling.
Input File Usage
SUBMODEL, ACOUSTIC TO STRUCTURE,
ABSOLUTE EXTERIOR TOLERANCE=value
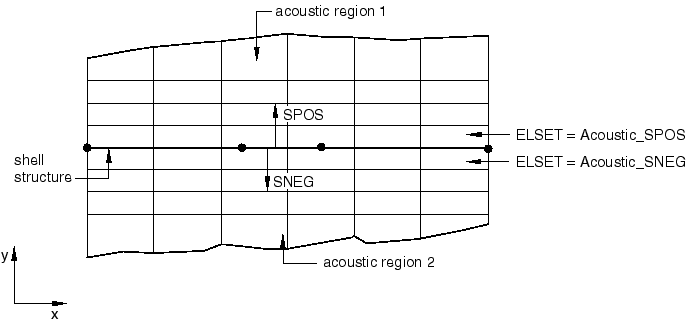
Specifying Driven Nodes for Shells with Acoustic Pressures on Both Sides
In certain problems the acoustic pressure may act on both sides of a shell structure.
Figure 4 shows a section of a global model consisting of a shell structure that is sandwiched
between two acoustic media.
Figure 4. A cross-section of the acoustic-to-structure global model with acoustic regions
on both sides of the shell.
Separate element sets consisting of acoustic elements on the positive and negative
sides of the shell are defined, respectively. The nodal pressures for nodes attached to
elements in these sets are written to the selected results file. Figure 5 shows the submodel that consists only of the refined shell structure.
Figure 5. The acoustic-to-structure submodel with acoustic pressure on both sides of the
shell.
Two separate surfaces are defined on the SPOS and
SNEG sides, respectively. To apply the acoustic
pressure from the global analysis on each side of the shell correctly, you must specify
the surface name along with the corresponding acoustic element set.
Input File Usage
SUBMODEL, ACOUSTIC TO STRUCTURE, GLOBAL ELSET=Acoustic_SPOSShell_SPOS
SUBMODEL, ACOUSTIC TO STRUCTURE, GLOBAL ELSET=Acoustic_SNEGShell_SNEG
Defining Geometric Tolerances
A geometric tolerance is used to define how far a boundary node in the submodel can lie
outside the exterior surface of the global model, as that surface is interpolated in the
global, undeformed finite element model. By default, nodes in the submodel must lie
within a distance calculated by multiplying the average element size in the global model
by 0.05. You can change the tolerance, which is useful in cases where submodel driven
nodes lie to a greater extent outside the global model exterior surface. Tolerances
larger than this default value, however, may result in significantly greater computation
times and lower accuracy in the driven solution for driven nodes significantly outside
the global model exterior surface.
You can define the geometric tolerance as a fraction of the size of the average element
in the global model or as an absolute distance in the length units chosen for the model.
If both tolerances are defined, Abaqus uses the tighter tolerance.
Input File Usage
Use the following option to define the geometric tolerance as an absolute
distance:
The Exterior Tolerance in Solid-to-Solid Submodeling
The exterior tolerance for a solid-to-solid submodel analysis is indicated by the
shaded region in Figure 6. If the distance between the driven nodes and the free surface of the global model
falls within the specified tolerance, the solution variables from the global model are
extrapolated to the submodel.
Figure 6. The exterior tolerance in solid-to-solid submodeling.
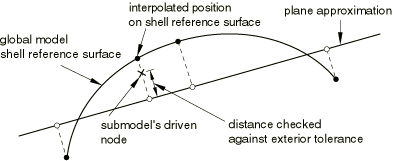
The Exterior Tolerance in Shell-to-Shell Submodeling
In a shell-to-shell submodel analysis Abaqus checks whether the driven nodes of the submodel lie sufficiently close to the
reference surface of the shell elements in the global model. To simplify calculations,
the closest point in the global model is calculated as the intersection of a line
drawn through the node on the submodel with the reference surface of the shell in the
global model. The direction of the line is normal to a flat surface approximation to
each shell element. The normal to the flat surface is the average of the normals at
the nodes of the shell element. The distance checked against the specified exterior
tolerance is shown in Figure 7.
Figure 7. Flat surface approximation in shell-to-shell submodeling.
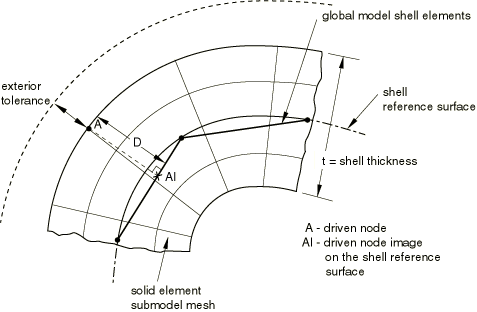
The Exterior Tolerance in Shell-to-Solid Submodeling
For shell-to-solid submodeling Abaqus uses two kinds of tolerances to determine the relationship between the submodel and
the global model. First, the closest point on the shell reference surface of the
global model is determined. This point, the “image node,” is shown in Figure 8. The user-specified exterior tolerance is used to check if the image node lies
within the domain of the global model. Then the distance, , between the driven node and its image is checked; if the distance
is less than half the value of the specified shell thickness plus the exterior
tolerance, it is accepted. This check is only approximate if the global model has
varying shell thickness or if the shell reference surface is offset from the
midsurface.
Figure 8. The exterior tolerance in shell-to-solid submodeling.
Permitting Driven Nodes to Be Excluded from Submodeling
In some cases (such as when your submodel geometry is more detailed than the global
model in regions near a free surface) you may specify driven nodes that Abaqus will find, even when accounting for the search tolerance, to be outside the region of
the global model elements. By default, these cases result in an error message. In
solid-to-solid submodeling you can, however, specify that Abaqus ignore driven nodes that cannot be found. Use this option with caution and always
evaluate the list of nodes that are labeled as not found. Most cases where Abaqus finds driven nodes to lie outside the global model reflect a modeling error and use
of the intersection only option may lead to incorrect results in these cases.
Input File Usage
Use the following option to specify that Abaqus ignore driven nodes that cannot be found in the global model elements:
SUBMODEL, INTERSECTION ONLYlist of nodes or node set labels
The driven nodes ignored through the use of the
INTERSECTION ONLY parameter are then
ignored in all subsequent submodel boundary condition references.
Using the Field Import Interface
You specify the driven node set as the target node set for the external field when using
the field import interface.
The actual driven variables are defined in any step as a submodel boundary condition. The
boundary conditions are “driven variables” obtained from the results or output database
file of the global analysis.
The degrees of freedom on the driven nodes of the submodel must exist at the forcing
nodes of the global model. In a problem involving an acoustic fluid submodel driven by a
structural global model, for example, acoustic interface elements should be created on the
submodel's driven boundary with the structure.
For solid-to-solid and shell-to-shell submodeling specify the individual degrees of
freedom to be driven. In most cases all components of the solution variables
(displacements, rotations, temperatures, etc.) at these nodes are driven by the global
solution, although you may choose to drive only some components at any of the driven
nodes. For shell-to-solid submodeling the driven degrees of freedom are chosen
automatically based on a user-specified zone around the shell reference surface, as
explained later.
Abaqus/Explicit does not admit jumps in displacement and rotation boundary conditions (see Prescribed Displacement); any jumps in
the driven displacements and rotations will be ignored.
It is not recommended to have all the variables at all the nodes in the submodel driven
by the global solution.
For acoustic-to-structure submodeling, the loads due to acoustic pressure acting at the
driven nodes of the submodel are activated by specifying pressure (degree of freedom 8)
along with the driven node set.
Only one submodel boundary condition can be specified in each step of the analysis.
Specifying the Step Number from the Global Analysis
You specify the step of the global model history that is to be used for the driven
variables in the current submodel analysis step. When the global solution is obtained
from the results file, the zero increment is included if it was requested in the global
analysis (see About Output).
In a general analysis step or a direct-solution steady-state dynamic analysis step, Abaqus calculates the amplitudes for the driven variables as functions of time or frequency
from the results of the global model.
Scaling the Global Time Period to the Submodel Time Period
The global analysis and submodel analysis can have different time steps. You can
scale the time variable of the driven nodes from the global analysis to the step time
of the submodel analysis. This technique is useful when the analyses are static or
quasi-static in nature; the use of this technique in dynamic analyses with significant
inertial effects is not recommended. If the same step time is used in both the global
model and the submodel, the time scale has no effect. The time scale cannot be
specified in frequency domain analyses or in linear perturbation steps.
Abaqus will determine the values that the driven variables will follow throughout the step
in the submodel analysis by using the points in time at which the global solution
results or output database file was written. When the time variable of the driven
nodes of the global analysis is scaled and if the step time is different from the
submodel step time, the points in time of the driven variables are scaled to the
submodel step time.
For displacement-based submodeling the magnitude values of driven variables are
obtained by multiplying the displacement history as obtained from the global analysis
by a scaling parameter. You can scale the driven variables by setting the scaling
parameter in the definition of the submodel boundary conditions. This technique is
useful in scaling the submodel boundary conditions in a multiple-step analysis without
rerunning the global model. It can be used in Abaqus/Standard and Abaqus/Explicit for the same-to-same and shell-to-solid cases except for acoustic-to-structure
submodeling.
You can modify the submodel boundary condition to add new variables to the list of
driven variables, you can remove variables from the driven variable set, and you can
reintroduce them later (see Boundary Conditions). If a
submodel boundary condition is not redefined in a new step, the driven variables remain
constant at the magnitude associated with the end of the previous step. New nodes cannot
be added to the total set of driven nodes defined for the submodel; this set of driven
nodes is a fixed part of the model definition.
Automatically Selecting the Driven Variables in Shell-to-Solid Submodeling
For shell-to-solid submodeling the driven degrees of freedom at the driven nodes are
chosen automatically, depending on the distance between the driven node and the global
model shell reference surface. All displacement components are driven at nodes that lie
on the reference surface or within a “center zone,” as shown in Figure 9. The size of the center zone is specified as part of the submodel boundary condition
definition, as described below. For nodes that lie further away from the reference
surface, only the displacement components parallel to the shell reference surface are
driven. At least one layer of nodes in the submodel must be within the center zone; if
no nodes are found this close to the reference surface, Abaqus issues an error message.
Figure 9. Center zone choice in shell-to-solid submodeling.
Specifying the Size of the Center Zone in Shell-to-Solid Submodeling
The center zone method of prescribing driven variables usually provides a reasonable
transfer of the plane stress assumption in the shell model. The width of this zone
around the reference surface where all displacement components are driven may be
different for various driven nodes or node sets. If you do not provide values for the
center zone size, a default value of 10% of the maximum of the specified shell
thicknesses is assumed.
For complicated geometries it can be advantageous to assign a different center zone
size to different nodes or node sets.
Input File Usage
BOUNDARY, SUBMODEL, STEP=stepnodes, center zone size
Transferring Transverse Shear Stresses in Shell-to-Solid Submodeling
Usually it is enough for the layer of nodes closest to the shell reference surface to
lie inside the center zone. If a very fine solid mesh is used in the thickness
direction and substantial transverse shear stresses are transferred, it may be
necessary to make the center zone size large enough that multiple layers of nodes lie
inside the zone. However, if the transverse shear stresses at the submodel boundary
are high and the submodel is highly refined in the thickness direction, high local
stresses may develop since the shear force at the submodel boundary is transferred
only at the driven nodes within the center zone. High transverse shear stresses occur
only in regions where bending moments vary rapidly; it is better not to locate the
submodel boundary in such regions. It is best to locate the submodel boundary in areas
of low transverse shear stress in the global model.
Using the Field Import Interface
You specify the driven variables as part of the data defining the external field for
submodeling using the field import interface. The step time from the global model is
scaled to match the time period of the submodel.
There are several special considerations that are worth noting.
Limitations Using the Node-Based Submodeling Field Import Interface
The node-based submodeling field import interface has the following limitations:
You cannot include a step following a step in which a submodel is defined.
You cannot use a submodel job to restart a subsequent job or to import to a
subsequent job.
Submodeling is not supported in linear perturbation procedures, frequency-based
procedures, or a geostatic procedure.
A submodel job cannot contain a mixture of two-dimensional and three-dimensional
elements.
Two-dimensional, axisymmetric, and generalized plane-strain elements are not
supported.
Submodeling in a frequency domain is not supported.
Temperature degrees of freedom cannot be driven for shell elements.
Acoustic-to-structure submodeling is not supported.
Specifying the Shell Thickness in Shell-to-Shell Submodeling
For shell-to-shell submodeling the shell thickness generally is not changed
between the models. You can specify different shell thicknesses if, for
example, a local thickness change is being investigated; however,
Abaqus
does not check the validity of these differences.
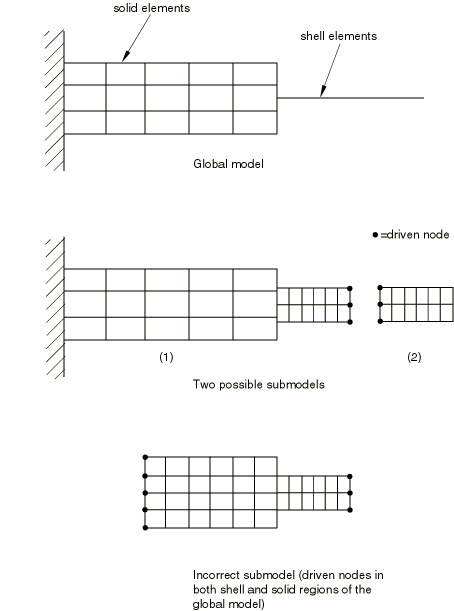
Limitations in Shell-to-Solid Submodeling
The following limitations and special cases apply to the shell-to-solid
capability:
The global model can contain both solid and shell elements; however,
when the shell-to-solid capability is used, all driven nodes must lie within
shell elements in the global model. If the driven boundary lies at the border
between a solid and a shell region, the driven nodes must be moved a small
distance away from the solid region (see
Figure 10).
Figure 10. A limitation of shell-to-solid submodeling.
Corners or kinks may exist in global models made of shell elements. At
such corners or kinks the shell elements only approximate the distribution of
the material away from the midsurface of the shell (see
Figure 11).
Because of such approximations, it is not possible to drive a submodel
correctly if the driven nodes of the submodel lie within a shell thickness from
a corner or a kink. If necessary, use the approach shown in
Figure 11.
Figure 11. Shell-to-solid submodeling around corners.
A better approach is to include the corner or kink as part of the
submodel and drive it from nodes well away from corners or kinks since they are
a source of stress concentration and high stress gradients (see
Figure 12).
Figure 12. Solid submodel of a shell intersection.
Temperature degrees of freedom cannot be driven in shell-to-solid
submodeling.
Alternative to Shell-to-Solid Submodeling
An alternative to shell-to-solid submodeling is the surface-based
shell-to-solid coupling capability discussed in
Shell-to-Solid Coupling.
Procedures
Neither the coupled thermal-electrical procedure nor any of the mode-based
dynamics procedures can be used on the submodel level. In addition, submodeling
cannot be used in conjunction with symmetric model generation or symmetric
results transfer. Adaptive meshes should not be used in the global model.
However, they can be used in the submodel analysis;
Abaqus
will always treat the driven nodes in the submodel as Lagrangian nodes.
Both general (possibly nonlinear) and linear perturbation steps can be used
in submodeling (see
General and Perturbation Procedures
for a discussion of general and linear perturbation steps).
Submodeling in Dynamic Procedures
The submodeling capability can be used in the dynamic procedures using
explicit integration (in
Abaqus/Explicit)
and in the dynamic procedures using direct integration (in
Abaqus/Standard).
The following combinations of procedures between the global model and the
submodel can be considered: explicit dynamic, implicit dynamic, dynamic coupled
thermal-stress, and coupled thermal-stress. In dynamic problems in which
inertial forces are significant, the global model and the submodel need to be
run for the same step time intervals.
In
Abaqus/Explicit
a quasi-static analysis is performed as a dynamic procedure. For this case and
for the static analyses performed in
Abaqus/Standard,
the time step of the global model and submodel can be different. The time
variable of the driven nodes from the global analysis must be scaled to the
step time of the submodel analysis to match the time variable of the amplitude
functions generated at the driven nodes to the step time used in the submodel.
For significantly dynamic problems in
Abaqus/Explicit,
a sufficiently large number of intervals need to be written to the results or
output database file for the global model. Preferably the displacement results
for the nodes that are used to drive the submodel should be saved for each
increment. This caution is necessary in particular for problems with elastic
material properties to avoid possible aliasing (under sampling), which can
cause solution distortion in the submodel. These requirements do not apply to
quasi-static problems.
Interpreting Acceleration Results
When you drive a submodel boundary with global model displacement results,
the displacements are interpreted as a smoothed piecewise linear function in
time, similar to how you would apply a displacement boundary condition using a
tabular amplitude definition (see
Using an Amplitude Definition with Boundary Conditions).
This smoothed function typically results in displacements and velocities at the
driven nodes that agree reasonably with the global model. Acceleration results
at the driven boundary, however, are generally not in good agreement with the
global model as they reflect the shape of the displacement history smoothing
rather than the global model acceleration results (information that is not
available from a piecewise linear global-model displacement history). The
submodel acceleration results away from the submodel driven nodes are less
affected by this smoothing and are typically in good agreement with the global
model response.
Obtaining a Solution at a Particular Point in Time Using Linear Perturbation Analysis
In
Abaqus/Standard
it is possible to study the submodel's linearized response corresponding to a
particular point in time in the global solution by using a static, linear
perturbation procedure in the submodel analysis. You can select the increment
in the global analysis step that is to be used as the basis for calculating the
values for the driven variables. If you do not select an increment in a static
linear perturbation step, the last increment of the selected step in the global
analysis is used as the basis for calculating the values for the driven
variables. You cannot select an increment in a general submodel step.
The submodeling capability can be used in the frequency domain. In this case
both the global model and the submodel must use the direct-solution
steady-state dynamic procedure. A frequency-domain submodel cannot be driven
with a time-domain global model, or vice versa. Mode-based steady-state
dynamics cannot be used at the submodel level.
The only restriction on the specification of the frequency range in the
submodel is that the minimum and maximum frequency should lie within the range
of calculated frequencies in the global model.
Abaqus
will interpolate the solution variables from the global model in the frequency
domain, as well as spatially, before applying them to the submodel. The results
will be most accurate if the frequencies at which the response in the submodel
is requested match the frequencies at which the response was calculated in the
global model. This is particularly true in the vicinity of the eigenfrequencies
of the global model.
In the global model you must write both the amplitude and the phase of the
nodal displacements to the results file so that
Abaqus
can apply the real and imaginary parts of the solution at the driven nodes in
the submodel. If you are using the output database to drive the submodel, you
need to request only nodal displacement output since displacement output to the
output database includes both real and imaginary parts.
Mixing General and Linear Perturbation Steps
It is possible to mix general steps and linear perturbation steps in both
the global and the submodel analyses.
Abaqus
allows general analysis steps to be treated as linear perturbation steps during
submodeling, and vice versa.
Example: Submodeling with General and Linear Perturbation Steps
For an example of submodeling that uses both general and linear
perturbation steps, consider the following situation. The global analysis
consists of a static preload—done as a general, nonlinear, analysis
step—followed by extraction of the eigenmodes of the preloaded structure, then
a step of 5 seconds of modal dynamic response analysis:
STEP
** Apply preload
STATIC
0.1, 1.0
…
** Write out results for nodes needed to
** interpolate to the submodel's boundary
NODE FILE, NSET=DETAILUEND STEPSTEP
** Calculate modes and frequencies
FREQUENCY
…
** The NODE FILE option is repeated because
** this is the first linear perturbation step
NODE FILE, NSET=DETAILUEND STEPSTEP
** Dynamic response of preloaded system
MODAL DYNAMIC
0.01, 5.0
…
END STEP
We wish to study the local, possibly nonlinear, response of a part of this
model that is so small that we do not need to model dynamic effects locally and
can, thus, perform two steps of static analysis:
It is perfectly acceptable that the submodel analysis requests general,
possibly nonlinear, analysis for both steps, while in the global analysis the
dynamic step was a linear perturbation step (modal dynamics is always a linear
perturbation analysis). It is your responsibility to judge that this use of the
submodeling feature is reasonable. For example, suppose that the global
analysis were continued with a fourth step of general, nonlinear static
response:
RESTART, READ, STEP=3
** Read state at end of initial preload
** (could equally well use RESTART, READ, STEP=1)
STEP
** Add more preload
STATIC
0.2, 1.0
…
END STEP
This fourth general analysis step starts with the state at the end of
general analysis Step 1 because the frequency extraction and the modal dynamic
steps are both linear perturbation steps. However, if we restart the submodel
analysis in the same way, the solution may not be comparable with the global
model solution:
The second step in the submodel is a general analysis step, to which the
response may be nonlinear, thus changing the state of the model. A valid
alternative would be to apply the Step 4 response to the submodel immediately
after the first step:
RESTART, READ, STEP=1
** Read state at end of preload step
STEP
** Add more preload
STATIC
0.2, 1.0
BOUNDARY, SUBMODEL, STEP=4
…
END STEP
Reinterpreting Solution Variables in the Submodel Analysis
During general analysis steps
Abaqus
works in terms of total solution variables such as the displacements,
.
In linear perturbation steps
Abaqus
works in terms of the displacement perturbation, ,
about a base state, .
When general analysis steps and linear perturbation steps are reinterpreted in
the submodel analysis, the global analysis results are treated as defined in
Table 1.
Table 1. Reinterpreting solution variables in the submodel analysis.
Global analysis step basis
Submodel step basis
Global increment specified in
definition of submodel boundary condition
Driven variable basis
General
General
none
Linear perturbation
General
none
General
Static, linear perturbation
Linear perturbation
Static, linear perturbation
In this table
is the current value of a driven variable in the submodel at any time during
a general, nonlinear, analysis step;
is the value of the perturbation of a driven variable in the submodel during
a linear perturbation step;
and
are the corresponding values of the same (geometrically interpolated)
variable in the global model;
is the “base state” value of the variable during a linear perturbation step
in the global analysis;
is the “base state” value of the variable during a linear perturbation step
in the submodel analysis;
is the value of
at increment i of the global analysis step; and
is the value of
at increment i of the global analysis step.
Mixing General and Linear Perturbation Steps in Shell-to-Solid Submodeling
Additional assumptions must be made for the shell-to-solid case when a
general procedure on the global model drives a linear perturbation procedure on
the submodel and vice versa. The assumptions depend on the geometric
formulation used (linear or nonlinear) and on the procedure combination. For
details and governing equations for these cases, see
Submodeling analysis.
Initial Conditions
The definition of initial conditions should be consistent between the global
model and the submodel.
Boundary Conditions
Boundary conditions (other than submodel boundary conditions) prescribed on
the degrees of freedom that are driven will replace those prescribed using
submodel boundary conditions. When this replacement occurs,
Abaqus
reports the change in the data file.
A node can be driven from the global model in some steps and have
user-prescribed boundary conditions in other steps. In these cases all relevant
boundary conditions must be respecified (see
Boundary Conditions).
Any other boundary conditions that are applied in the submodel region should
be imposed in the submodel analysis in the usual way. It is your responsibility
to apply such prescribed boundary conditions to the submodel correctly so that
they correspond to the loading of the global model.
Be careful with submodel boundary nodes that are also on planes of symmetry,
where both forms of boundary conditions can be applied. It may be helpful in
such cases to apply boundary conditions in a local coordinate system (see
Transformed Coordinate Systems).
The local coordinate system should be applied only to the boundary conditions
that are intended to override the submodel boundary conditions, since the
submodel boundary conditions are always output in the global coordinate
directions by the global model.
Loads
Any loads that are applied in the submodel region must be imposed in the
submodel analysis in the usual way. It is your responsibility to apply such
loads to the submodel correctly so that they correspond to the loading of the
global model. See
About Loads
for an overview of the loads available in
Abaqus.
Predefined Fields
The following predefined fields can be specified in a submodeling analysis,
as described in
Predefined Fields:
Nodal temperatures can be specified. Any difference between the applied
and initial temperatures will cause thermal strain if a thermal expansion
coefficient is given for the material (Thermal Expansion).
The specified temperature also affects temperature-dependent material
properties, if any.
The values of user-defined field variables can be specified. These
values affect only field-variable-dependent material properties, if any.
Abaqus
interpolates solution variables onto the submodel driven nodes. It can also
interpolate temperatures as field variables (see
Interpolating Data between Meshes
for details). Other predefined fields will not be interpolated to the nodes of
the submodel; they must be available from the input data for all nodes of the
submodel where they are required.
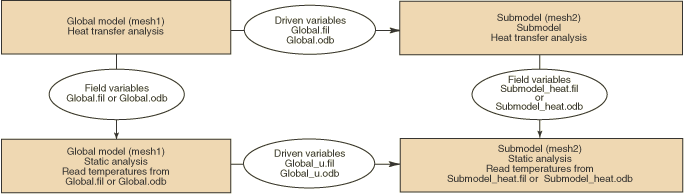
Abaqus/Standard
provides multiple approaches for cases where a submodel thermal-stress analysis
must be performed using temperature solutions from a global heat transfer
analysis.
Run a heat transfer analysis of the global model, and write the nodal
temperatures to the results or output database file. Run a sequentially coupled
thermal-stress analysis of the global model. The temperatures obtained from the
results or output database file of the global heat transfer analysis are field
variables in this case. If the mesh used in the thermal-stress analysis is
different from the mesh in the heat transfer analysis, specify that
Abaqus/Standard
should interpolate the temperature field from the heat transfer analysis mesh
to the thermal-stress analysis mesh. Run a thermal-stress analysis of the
submodel using the results or output database file for the global
thermal-stress analysis to read the driven variables (displacement field) and
using the results or output database file from either the global heat transfer
analysis or the global thermal-stress analysis to read the temperatures as
field variables. In either case the temperature field will have to be
interpolated to the current submodel nodes. If interpolation between dissimilar
meshes is necessary, the global output database file must be used to read the
temperatures. For details, see
Figure 13
and
Figure 14.
Figure 13. Sequentially coupled thermal-stress analysis for the global model
with only a thermal-stress analysis for the submodel. Figure 14. Sequentially coupled thermal-stress analysis for the global model
with only a thermal-stress analysis for the submodel.
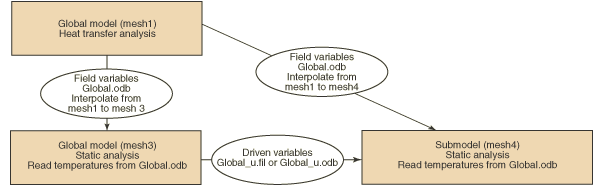
Run a heat transfer analysis of the global model, and write the nodal
temperatures to the results or output database file. Run a sequentially coupled
thermal-stress analysis (the global thermal-stress analysis) using the same
mesh (mesh1) as the global heat transfer analysis and the temperatures from the
results or output database file for the global heat transfer analysis. Next,
run a submodel heat transfer analysis using the mesh (mesh2) that is required
for the final submodel thermal-stress analysis, and write the nodal
temperatures to the results or output database file. Use the temperature
solution from the global heat transfer analysis to drive the solution of the
submodel heat transfer analysis. Finally, run the submodel thermal-stress
analysis using the temperatures (as field variables) obtained from the results
or output database file for the submodel heat transfer analysis and the
displacements (as driven variables) obtained from the global thermal-stress
analysis. See the detailed flow chart in
Figure 15.
Figure 15. Sequentially coupled thermal-stress analysis for both the global
model and submodel.
Material Options
Any of the material models described in
Abaqus Materials Guide
can be used in the global and submodel analyses. The material response defined
for the submodel may be different from that defined for the global model.
Elements
The dimensionality of the submodel must be the same as that of the global
model: both models must be either two-dimensional or three-dimensional. The
following limitations apply:
The boundary nodes of the submodel must lie within regions of the global
model where
Abaqus
is able to perform spatial interpolation to define the values of the driven
variables. Therefore, they must lie within (or, as allowed by the exterior
tolerance, near to) two- or three-dimensional geometrically defined elements in
the global model. Such geometrically defined elements are:
first- or second-order triangles or quadrilaterals in two
dimensions;
first- or second-order triangular or quadrilateral shells;
first- or second-order triangular or quadrilateral membranes; and
first- or second-order tetrahedra, wedges, or bricks in three
dimensions.
When shell elements with five degrees of freedom per node (S4R5, S8R5, STRI65, etc.) are used in the global model, the rotations are not
written to the results file or the output database; therefore, only the
displacement degrees of freedom can be driven. This restriction suggests that
submodeling should not be used with these elements or that the submodel should
include a set of narrow elements around its driven edges so that the
interpolated displacements at these nodes effectively transfer the rotation.
Five degree of freedom shells cannot be used in shell-to-solid submodeling.
The boundary nodes cannot lie in regions of the global model where there
are only one-dimensional elements (beams, trusses, links, axisymmetric shells)
since
Abaqus
does not provide the necessary interpolation of results for such elements.
The boundary nodes cannot lie in regions of the global model where there
are only user elements, substructures, springs, dashpots, etc. since those
element types do not allow for geometric interpolation.
The boundary nodes cannot lie in regions of the global model where there
are only axisymmetric solid elements with nonlinear, asymmetric deformation (CAXA elements). The submodeling capability is currently not supported
for these elements.
The reference node associated with generalized plane strain elements (CPEG) cannot be used as a driven boundary node in a submodeling
analysis.
As described above, nodal output requests to the results file or output
database file must be used in the global analysis to save the values of the
driven variables at the submodel boundary.
Input File Template
Global Analysis:
HEADING
…
STEP
Step 1
STATIC (orDYNAMIC, etc.)
Data line to define step time and control incrementation
…
NODE FILEList of solution variables to be used to drive the submodelOUTPUT, FIELDNODE OUTPUTList of solution variables to be used to drive the submodelEND STEP
Submodel Analysis Using the Submodel Interface:
HEADING
…
SUBMODEL, EXTERIOR TOLERANCE=toleranceList of all nodes to be driven
**
STEPSTATIC (or any other allowable procedure)
Data line to define step time (must be the same as the step time in the global analysis unless theTIMESCALE parameter is used on the BOUNDARY option) and control incrementation
…
BOUNDARY, SUBMODEL, STEP=1
Data lines listing nodes and degrees of freedom to be driven in this step
…
END STEP
Submodel Analysis Using the Field Import Interface: